ตอนที่ 6: Voice Coil Motor (VCM) กล้ามเนื้อแม่เหล็กไฟฟ้า ขยับแขนหัวอ่านระดับนาโน
1. 🎯 ตอนที่ 6: Voice Coil Motor (VCM) กล้ามเนื้อแม่เหล็กไฟฟ้า ขยับแขนหัวอ่านระดับนาโน
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับน้องๆ วิศวกรสายคุมระบบ (Control Systems) และเมคคาทรอนิกส์ทุกคน! กลับมาลุยกันต่อในซีรีส์ เจาะลึกวิศวกรรมเบื้องหลังอุตสาหกรรมฮาร์ดดิสก์ไดรฟ์
ในตอนที่แล้วเราได้เห็นการทำงานของ Spindle Motor ที่เปรียบเสมือน “หัวใจ” สูบฉีดให้แผ่นดิสก์หมุนด้วยความเร็วสูงไปแล้ว วันนี้พี่จะพาน้องๆ ไปรู้จักกับ “กล้ามเนื้อ” ของฮาร์ดดิสก์กันบ้าง นั่นก็คือ Voice Coil Motor (VCM)
ลองจินตนาการดูนะครับ ถ้าน้องต้องยืนอยู่บนแพลตฟอร์มที่สั่นสะเทือนตลอดเวลา แล้วพี่สั่งให้น้องยืดแขนออกไปใช้ปลายนิ้วชี้แตะ “จุดกึ่งกลางของแบคทีเรีย” ที่อยู่บนจานที่กำลังหมุนด้วยความเร็ว 15,000 รอบต่อนาที โดยต้องแตะให้ตรงเป๊ะในเวลาแค่ 2 มิลลิวินาที! น้องจะทำได้ไหม? แน่นอนว่ากล้ามเนื้อมนุษย์ทำไม่ได้ แต่ VCM ในฮาร์ดดิสก์ทำได้ครับ!
ในยุคแรกๆ อุตสาหกรรมฮาร์ดดิสก์เคยใช้ Stepper Motor ในการขยับแขนหัวอ่าน แต่มันทำงานแบบกะระยะ (Open-loop) ซึ่งหยาบเกินไป เมื่อความหนาแน่นของข้อมูล (Track Density) พุ่งสูงขึ้นเรื่อยๆ วิศวกรจึงต้องเปลี่ยนมาใช้ระบบ VCM ควบคู่กับการควบคุมแบบปิด (Closed-loop Servo Control) ที่ให้ความแม่นยำสูงกว่าอย่างเทียบไม่ติด วันนี้เราจะมาผ่ากล้ามเนื้อมัดนี้ดูว่ามันทำงานอย่างไรครับ!
3. 🧠 แก่นวิชาวิศวกรรม (Core Concepts)
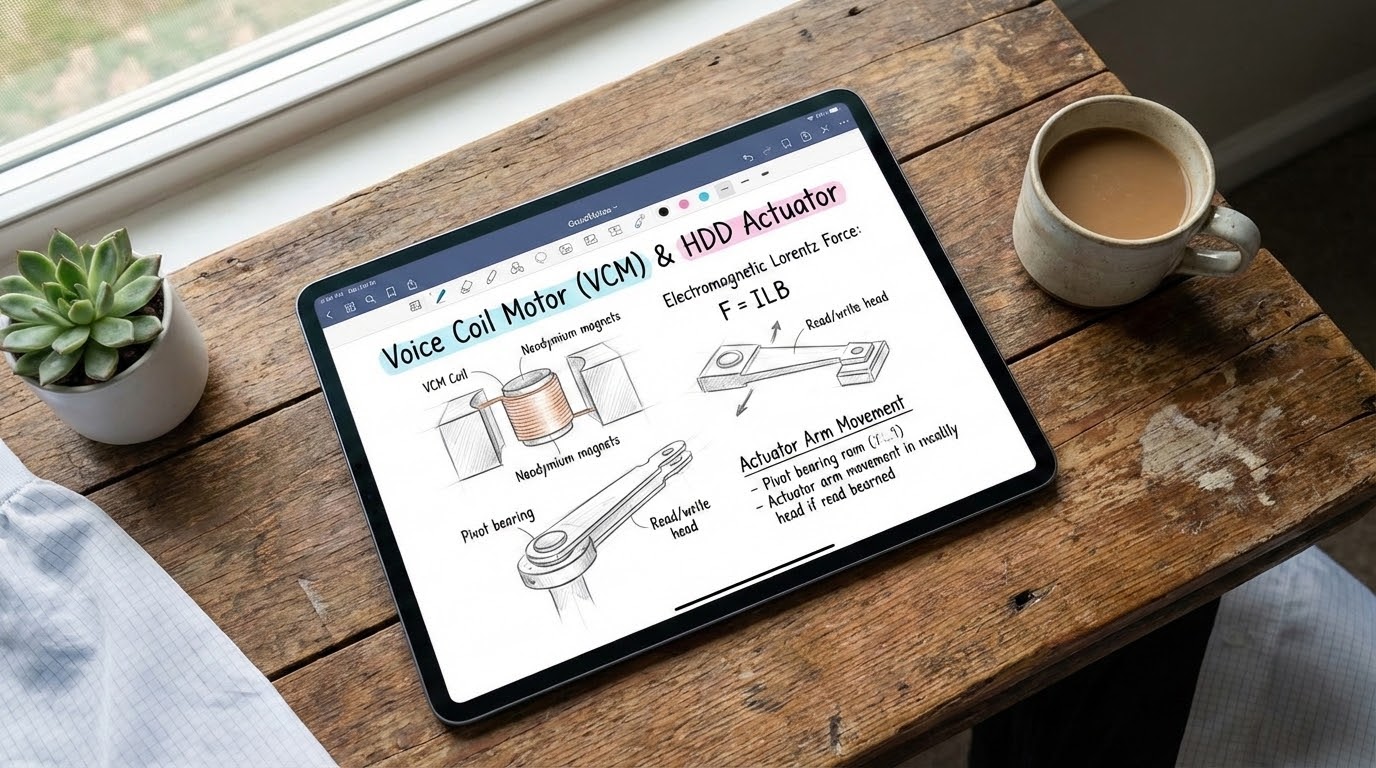
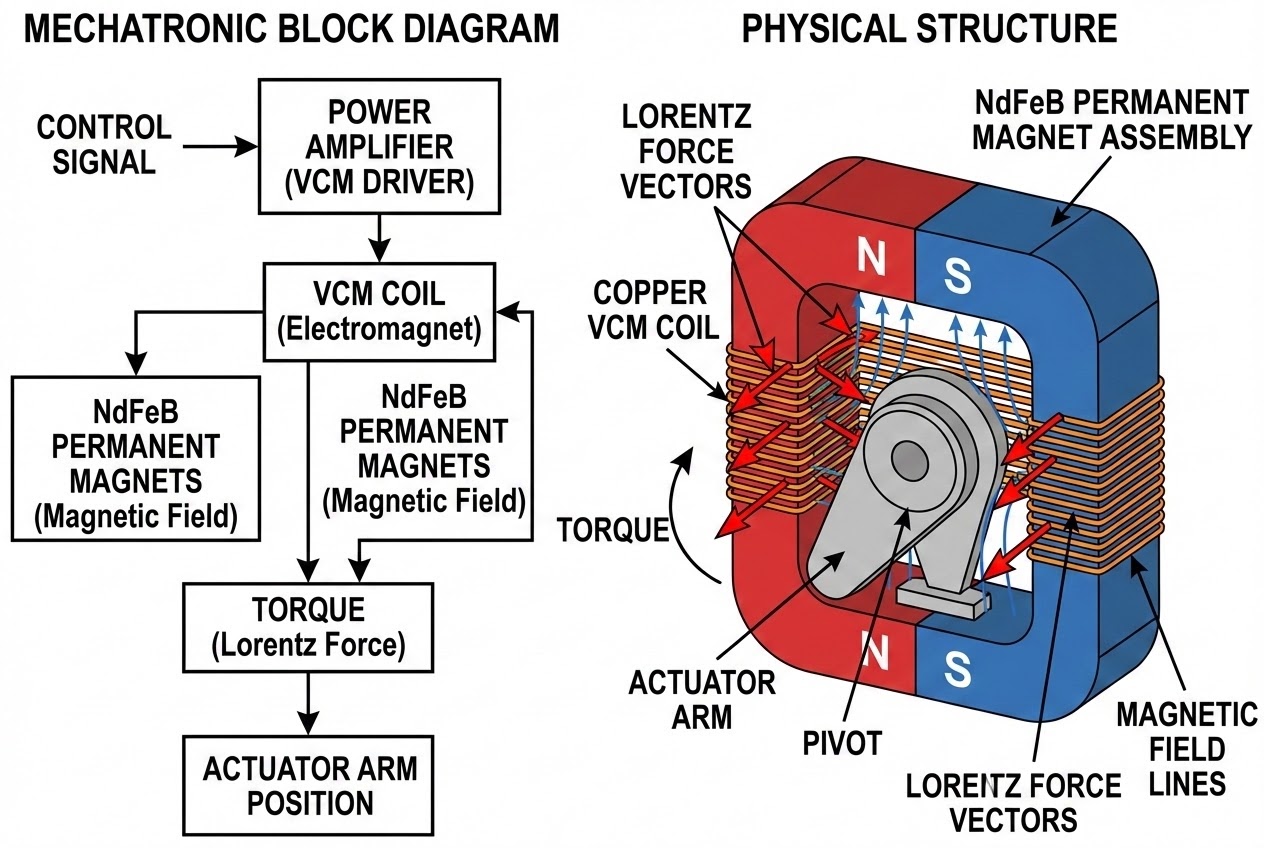
กล้ามเนื้อขับเคลื่อนแขนหัวอ่านที่เราเรียกกันติดปากว่า VCM (Voice Coil Motor) มีหลักการทำงานเหมือนกับ “ขดลวดในลำโพงเครื่องเสียง” เลยครับ (นี่คือที่มาของชื่อ Voice Coil) โดยเปลี่ยนจากการผลักกรวยกระดาษให้เกิดเสียง มาเป็นการเหวี่ยงแขนหัวอ่านแทน ฮาร์ดดิสก์ในปัจจุบันใช้ Actuator แบบหมุน (Rotary VCM Actuator) ซึ่งประกอบด้วยชิ้นส่วนหลักๆ ดังนี้:
- Permanent Magnets (แม่เหล็กถาวร): ทำจากวัสดุ Neodymium-Iron-Boron (NdFeB) ที่มีพลังแม่เหล็กมหาศาล ติดตั้งอยู่บนโครงสร้าง Yoke เพื่อสร้างสนามแม่เหล็กที่เข้มข้นและสม่ำเสมอ
- Voice Coil (ขดลวดทองแดง): เป็นขดลวดน้ำหนักเบาที่พันอยู่รอบโครงสร้างบริเวณหางของแขน Actuator (E-block) เมื่อเราปล่อยกระแสไฟฟ้าเข้าไป ขดลวดนี้จะสร้างสนามแม่เหล็กไฟฟ้าขึ้นมา
- Pivot Bearing (ตลับลูกปืนจุดหมุน): เป็นจุดหมุนตรงกลางของแขน Actuator โดยมีขดลวด (Coil) อยู่ฝั่งหนึ่ง และมีก้านจับหัวอ่าน (Suspension) อยู่ที่ปลายอีกฝั่งหนึ่ง
ลอจิกการทำงาน (Lorentz Force): เมื่อ VCM Driver จ่ายกระแสไฟฟ้าเข้าไปในขดลวดที่ลอยอยู่ท่ามกลางสนามแม่เหล็กของ NdFeB จะเกิด “แรงลอเรนตซ์ (Lorentz Force)” ผลักให้ขดลวดขยับไปทางซ้ายหรือขวาตามกฎมือซ้ายของเฟลมมิง แรงผลักนี้จะสร้าง “แรงบิด (Torque)” รอบจุดหมุน Pivot ทำให้ปลายแขนอีกฝั่งที่ติดหัวอ่านอยู่ (Read/Write Head) เหวี่ยงตัวเป็นแนวส่วนโค้ง (Arc) กวาดผ่านพื้นผิวของแผ่นดิสก์ได้อย่างรวดเร็ว
โดยระบบคุมกล้ามเนื้อนี้จะต้องรับบทหนักใน 2 โหมดการทำงานหลักๆ คือ:
- Track Seeking (การค้นหาแทร็ก): เหวี่ยงแขนหัวอ่านจากแทร็กปัจจุบันไปยังแทร็กเป้าหมายให้ “เร็วที่สุด” (ใช้กระแสไฟสูงมากจนชน Limit)
- Track Following (การติดตามแทร็ก): เมื่อถึงเป้าหมายแล้ว ต้องคุมกล้ามเนื้อให้ “นิ่งที่สุด” เพื่อให้หัวอ่านอยู่ตรงกึ่งกลางแทร็กตลอดเวลา แม้จะมีลมพายุจากการหมุนของดิสก์มาตีแขนก็ตาม
4. 🧮 ร่ายมนต์สมการและลอจิกการทำงาน (The Math & Logic)
ในมุมมองของวิศวกร Control ระบบ VCM คือโจทย์คลาสสิกที่สวยงามมากครับ ถ้าเรามองข้ามความยืดหยุ่นของวัสดุไปก่อน และมองว่าแขนหัวอ่านคือ “ก้อนมวลแข็งๆ (Rigid Body)” เราสามารถเขียนสมการการเคลื่อนที่ตามกฎของนิวตันได้ดังนี้:
$$ \ddot{\theta}(t) = \frac{K_t}{J} I(t) $$
- $ \ddot{\theta}(t) $ คือ ความเร่งเชิงมุม (Angular acceleration) ของแขน Actuator
- $ K_t $ คือ ค่าคงที่แรงบิดของ VCM (Torque constant) ซึ่งมาจากการออกแบบขดลวดและแม่เหล็ก
- $ J $ คือ โมเมนต์ความเฉื่อย (Moment of inertia) ของแขนหมุนทั้งยวง
- $ I(t) $ คือ กระแสไฟฟ้า (Current) ที่จ่ายเข้าขดลวด VCM
ทีนี้ ถ้าระยะจากจุดหมุนไปยังหัวอ่านคือ $ L $ เราจะได้ระยะขจัดเชิงเส้นของหัวอ่าน $ y(t) = L\theta(t) $ และมักจะแปลงหน่วยให้เป็นจำนวนแทร็ก (Tracks) โดยคูณด้วย Track Density ($ D_{trk} $) เข้าไป ทำให้สมการกลายเป็น:
$$ \ddot{y}(t) = \frac{D_{trk} L K_t}{J} I(t) = K I(t) $$
และเมื่อแปลงเป็น Transfer Function ($G_v(s)$) ในโดเมนความถี่ (Laplace Transform) เราจะได้สมการพื้นฐานที่วิศวกรทุกคนต้องเจอ:
$$ G_v(s) = \frac{Y(s)}{U(s)} = \frac{K}{s^2} $$ (โดยกำหนดให้ $I(s)$ แปลงตามสัดส่วนของ Voltage input $U(s)$)
อธิบายภาษาคนสไตล์รุ่นพี่: สมการ $\frac{K}{s^2}$ หรือ “Double Integrator” นี้บอกเราว่า กล้ามเนื้อ VCM มันทำงานตามหลักความเร่ง ถ้าน้องป้อนกระแสไฟฟ้าเข้าไปนิดเดียว แขนมันจะไม่ใช่แค่ขยับไปตำแหน่งใหม่แล้วหยุดนะครับ แต่มันจะ “เร่งความเร็วไปเรื่อยๆ ไม่มีวันหยุด” จนกว่าน้องจะจ่ายกระแสในทิศตรงข้ามเพื่อเบรกมัน! (เหมือนเหยียบคันเร่งรถในอวกาศ) ดังนั้นการออกแบบ Controller จึงต้องมีการใส่ Derivative term (ตัว $D$ ใน PID หรือ Lead compensator) เข้าไปช่วยเบรกและเพิ่ม Phase Margin เสมอ ยิ่งไปกว่านั้น กระแสไฟที่จ่ายได้จะมีขีดจำกัดจากตัว VCM Driver เสมอ (Current Saturation) ($ |u| \le U_m $) ทำให้ช่วงที่ทำ Track Seeking เรามักจะต้องใช้การควบคุมแบบ Bang-Bang Control หรือ PTOS (Proximate Time-Optimal Servomechanism) เข้ามาช่วยจัดการลอจิกการเร่งและเบรกให้เข้าเป้าได้เร็วที่สุดนั่นเองครับ
5. 🛡️ เคล็ดลับคนหน้างาน (Factory Floor Pro-Tips)
ตอนที่น้องนั่งออกแบบ Control Loop ในโปรแกรม MATLAB แขน VCM จะดูเป็นสมการ $\frac{K}{s^2}$ ที่เพอร์เฟกต์มากๆ แต่พอมาเจอของจริงหน้าไลน์ผลิต น้องจะเจอกับ “ปีศาจร้าย” 2 ตัวที่ซ่อนอยู่ในกลไกนี้ครับ:
- Pivot Friction & Flex Cable Bias (แรงเสียดทานและแรงดึงสายแพ): ตรงจุดหมุน (Pivot bearing) จะมีแรงเสียดทานซ่อนอยู่ (ทั้งแบบ Coulomb และ Viscous) นอกจากนี้ยังมีสายแพ (Data Flex Cable) ที่คอยดึงรั้งแขนเอาไว้เหมือนสปริง ในช่วงเวลาที่หัวอ่านทำ Track Following ซึ่งต้องขยับชดเชยระยะแค่นาโนเมตร แรงเสียดทานและแรงรั้งเหล่านี้จะกลายเป็น Nonlinearity ที่น่าปวดหัวมากๆ ทำให้เกิด Steady-state error (หัวอ่านไม่ยอมอยู่ตรงกลางเป๊ะๆ) วิศวกรหน้างานจึงต้องใส่ Integrator (ตัว $I$) หรือใช้เทคนิค Robust Control เข้ามาปราบมันให้อยู่หมัดครับ
- High-Frequency Resonances (เรโซแนนซ์ความถี่สูง): แขนหัวอ่านไม่ใช่ไม้บรรทัดเหล็กแข็งๆ แต่มันบอบบาง! เมื่อเราเหวี่ยงมันด้วยความเร่งสูงๆ โครงสร้างมันจะเกิดการบิดตัว (Torsional mode) และแกว่งซ้ายขวา (Sway mode) ลองนึกภาพเราจับไม้บรรทัดพลาสติกแล้วสะบัดเร็วๆ ดูสิครับ มันจะสั่นดึ๋งๆ โหมดความถี่พ้องเหล่านี้มักจะอยู่ที่ช่วง 3 kHz ถึง 12 kHz ซึ่งมันไปรบกวนสัญญาณ PES (Position Error Signal) ทันที Pro-Tip: ทางแก้ของวิศวกรคือการใส่ “Notch Filter” ดักไว้ในสมการควบคุม เพื่อกรองเอาสัญญาณความถี่ที่ตรงกับจุด Resonance ทิ้งไป ไม่ให้กล้ามเนื้อ VCM ไปกระตุ้นให้แขนสั่นครับ
6. 🏁 บทสรุป (To be continued…)
เป็นอย่างไรบ้างครับกับความมหัศจรรย์ของ Voice Coil Motor กล้ามเนื้อแม่เหล็กไฟฟ้าที่ผสมผสานทั้งฟิสิกส์ มอเตอร์ และทฤษฎีการควบคุมเข้าไว้ด้วยกันอย่างลงตัว การคุมกลไกนี้ให้ขยับหาข้อมูลได้เร็วดั่งใจคิด คือศิลปะขั้นสูงของวิชา Mechatronics เลยล่ะครับ
แต่เรื่องราวยังไม่จบแค่นี้… เมื่อความจุฮาร์ดดิสก์ทะลุขีดจำกัด แทร็กข้อมูลเล็กลงจนเล็กกว่าเชื้อไวรัส แค่กล้ามเนื้อไหล่ (VCM) อย่างเดียว เริ่มไม่สามารถพาปลายนิ้วไปแตะเป้าหมายได้นิ่งพอเสียแล้ว ในตอนหน้า พี่จะพาน้องๆ ไปรู้จักกับ “Dual-Stage Actuator” (ระบบขับเคลื่อนสองสเตจ) อาวุธลับที่เปรียบเสมือนการเพิ่ม “ข้อมือและปลายนิ้ว” ระดับไมโครให้กับฮาร์ดดิสก์! รอติดตามความล้ำนี้กันได้เลยครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบ Automation, Machine Vision หรือระบบควบคุมความแม่นยำสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p