ตอนที่ 14: คำศัพท์เฉพาะทางที่เด็กจบใหม่ต้องรู้ก่อนเข้าโรงงาน HDD (พจนานุกรมฉบับวิศวกร)
1. 🎯 ตอนที่ 14: คำศัพท์เฉพาะทางที่เด็กจบใหม่ต้องรู้ก่อนเข้าโรงงาน HDD (พจนานุกรมฉบับวิศวกร)
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับน้องๆ วิศวกรจบใหม่ทุกคน! ขอต้อนรับเข้าสู่ซีรีส์ เจาะลึกวิศวกรรมเบื้องหลังอุตสาหกรรมฮาร์ดดิสก์ไดรฟ์ กันอีกครั้งนะครับ
จำวันแรกที่พี่ก้าวเท้าเข้าไปในห้องประชุมของโรงงาน HDD ได้เลย ตอนนั้นพวกพี่ๆ ซีเนียร์และผู้เชี่ยวชาญชาวต่างชาติคุยกันไฟแลบ “เฮ้ย! ไดรฟ์โมเดลนี้ TMR บวมว่ะ แถม Access Time ก็ตก Seek profile เป็นไงบ้าง? ลองเช็ก Latency ซิ!” ตอนนั้นพี่นั่งมึนเป็นไก่ตาแตกเลยครับ นึกว่าพวกเขาพูดภาษาต่างดาวกันอยู่
ถ้าน้องๆ ไม่อยากนั่งเอ๋อในที่ประชุมเหมือนพี่สมัยก่อน วันนี้พี่ได้รวบรวม “คำศัพท์เฉพาะทาง (Jargon)” ขั้นเทพที่วิศวกรโรงงาน HDD ใช้กันทุกวันในไลน์ผลิตและแผนก R&D มาย่อยให้ฟัง รับรองว่าอ่านจบตอนนี้น้องๆ จะคุยกับหัวหน้างานรู้เรื่อง และดูโปรขึ้นอีก 10 ระดับเลยครับ!
3. 🧠 แก่นวิชาวิศวกรรม (Core Concepts)
เรามาดูคำศัพท์กลุ่มแรกที่เกี่ยวกับ “ความเร็วและเวลา” ในการเข้าถึงข้อมูลกันก่อนครับ ถ้าน้องออกแบบระบบกลไกให้ตายยังไง ถ้าตัวเลขพวกนี้ไม่ผ่าน ลูกค้าก็ไม่ซื้อครับ:
- Seek Time (เวลาค้นหา): คือเวลาที่มอเตอร์ VCM ใช้ในการเหวี่ยงแขน Actuator เพื่อพาหัวอ่าน (Read/Write Head) จากแทร็กปัจจุบันไปยังแทร็กเป้าหมาย เปรียบเหมือนเวลาที่น้องขับรถจากซอย 1 ไปซอย 10 นั่นแหละครับ โดยปกติเรามักจะคุยกันที่ Average Seek Time ซึ่งเป็นการคำนวณค่าเฉลี่ยจากการกระโดดข้ามแทร็กในทุกระยะทางที่เป็นไปได้ (มักจะคิดที่ระยะประมาณ 1/3 ของระยะกวาดสูงสุด)
- Settle Time (เวลาตั้งหลัก): เมื่อหัวอ่านวิ่งมาถึงแทร็กเป้าหมายแล้ว มันจะยังอ่านเขียนข้อมูลทันทีไม่ได้นะครับ! แขนมันจะยังมีความสั่นค้างอยู่ (Residual vibration) Settle Time คือเวลาที่เราต้อง “รอ” ให้หัวอ่านหยุดสั่นและเกาะอยู่ตรงกลางแทร็กได้นิ่งพอ
- Rotational Latency (ความหน่วงจากการหมุน): เมื่อหัวอ่านวิ่งมาถึงและตั้งหลักเสร็จแล้ว แทร็กมันเป็นวงกลมถูกไหมครับ? ข้อมูลที่น้องอยากได้อาจจะยังหมุนมาไม่ถึงหัวอ่าน น้องก็ต้องรอให้แผ่นดิสก์หมุนเอาข้อมูลมาป้อนให้ถึงปาก เวลารอตรงนี้เรียกว่า Latency ครับ เปรียบเหมือนน้องนั่งรอจานซูชิสายพานหมุนมาถึงโต๊ะนั่นเอง
- Data Transfer Rate / Throughput (อัตราการส่งข้อมูล): คือความเร็วที่หัวอ่านสามารถดูดข้อมูลออกจากแผ่นดิสก์ หรือพ่นข้อมูลลงแผ่นดิสก์ได้ มีหน่วยเป็น Bits per second (หรือ MB/s)
- TMR (Track Misregistration): คำนี้คือ “ความเป็นความตาย” ของวิศวกร Servo ครับ! มันคือระยะความคลาดเคลื่อนที่หัวอ่านเบี่ยงเบนออกจากจุดศูนย์กลางแทร็ก แบ่งย่อยได้เป็น 2 คำคือ:
- WWTMR (Write-to-Write TMR): ความคลาดเคลื่อนระหว่างรอยต่อของแทร็กที่เราเขียนกับแทร็กข้างๆ (ถ้าระยะมันบีบเข้ามาใกล้กันเกินไปเรียกว่า Track Squeeze)
- WRTMR (Write-to-Read TMR): ความคลาดเคลื่อนระหว่างจุดกึ่งกลางของแทร็กที่ถูกเขียนไว้แล้ว กับตำแหน่งที่หัวอ่านกำลังบินเกาะอยู่ตอนอ่านข้อมูล
4. 🧮 ร่ายมนต์สมการและลอจิกการทำงาน (The Math & Logic)
เราเป็นวิศวกร จะคุยกันแค่คำนิยามปากเปล่าไม่ได้ ต้องเอาสมการคณิตศาสตร์มากางดูลอจิกกันครับ:
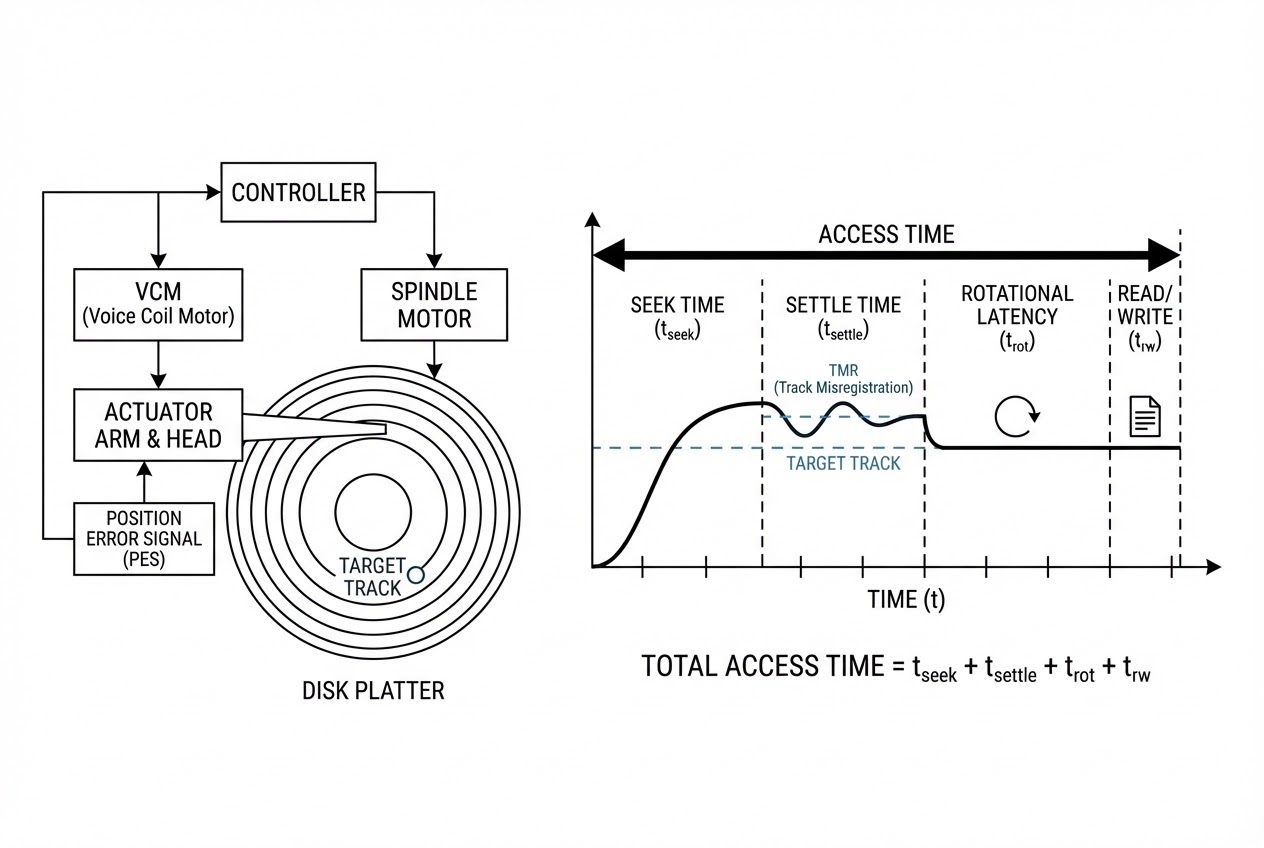
1. สมการสมรรถนะการเข้าถึงข้อมูล (Access Time Equation): เวลาที่คอมพิวเตอร์ต้องรอตั้งแต่สั่งขอข้อมูล จนถึงจังหวะที่หัวอ่านพร้อมดูดข้อมูลเข้าเครื่อง เราเรียกว่า Access Time ($\tau$) ซึ่งเกิดจากผลรวมของ 3 ตัวแปรที่เราเพิ่งเรียนไปครับ:
$$ \tau = \tau_{sk} + \tau_{s} + \tau_{l} $$
- $\tau_{sk}$ คือ Seek time (เวลาเหวี่ยงแขนไปหาแทร็ก)
- $\tau_{s}$ คือ Settle time (เวลาตั้งหลักให้แขนนิ่ง)
- $\tau_{l}$ คือ Rotational latency (เวลารอซูชิสายพานหมุนมาถึง) (สมการนี้บอกเราว่า ถ้าน้องอยากให้ฮาร์ดดิสก์ทำงานเร็ว น้องต้องแก้ปัญหาทั้งฝั่ง VCM (ลด $\tau_{sk}, \tau_{s}$) และฝั่ง Spindle Motor (ลด $\tau_{l}$))
2. สมการอัตราการส่งข้อมูล (Data Rate Equation): Data Rate ($D_r$) หรือ Throughput ของหัวอ่าน ขึ้นอยู่กับ 2 ปัจจัยหลักทางฟิสิกส์:
$$ D_r \text{ (bits/sec)} = D_l \text{ (bits/inch)} \times v \text{ (inches/sec)} $$
- $D_l$ คือ Linear data density (ความหนาแน่นของข้อมูลในแนวยาวของแทร็ก)
- $v$ คือ ความเร็วเชิงเส้นของแผ่นดิสก์เทียบกับหัวอ่าน (Linear velocity)
5. 🛡️ เคล็ดลับคนหน้างาน (Factory Floor Pro-Tips)
ถ้าน้องๆ ได้เข้าไปอยู่ในทีม Servo Control หรือทีม Read/Write Channel พี่มีกฎเหล็กจากหน้างานมาฝากครับ:
- กฎ 10% ของ TMR: ในการออกแบบระบบ Servo เรามีงบประมาณความคลาดเคลื่อน (TMR Budget) ที่ตายตัวครับ กฎเหล็กของวงการคือ “ความคลาดเคลื่อน TMR แบบ $3\sigma$ จะต้องมีค่าน้อยกว่า 10% ของความกว้างแทร็ก (Track Pitch) เสมอ” สมมติว่าไดรฟ์รุ่นใหม่มี Track Pitch ที่ $1 \mu m$ แปลว่าระบบ Servo ของน้องห้ามปล่อยให้หัวอ่านแกว่งเกิน $0.1 \mu m$ เด็ดขาด! ถ้าแกว่งเกินนี้ ข้อมูลที่เขียนจะไปทับแทร็กข้างๆ ทันทีครับ
- นิยามของคำว่า “นิ่งพอ” ใน Settle Time: คำว่าหัวอ่านนิ่งแล้ว ไม่ได้แปลว่า Error เป็นศูนย์นะครับ แต่ในลอจิกของ Firmware เราจะอนุญาตให้เริ่มกระบวนการ “เขียน (Write)” ได้ ก็ต่อเมื่อ Position Error มีค่าน้อยกว่า 10% ของแทร็ก และอนุญาตให้ “อ่าน (Read)” ได้เมื่อ Error น้อยกว่า 15% ไม่ว่าน้องจะกระโดดข้ามมาไกลกี่แสนแทร็กก็ตาม ข้อกำหนดนี้ต้องเป๊ะเสมอครับ!
6. 🏁 บทสรุป (To be continued…)
เป็นยังไงบ้างครับกับพจนานุกรมฉบับย่อสำหรับวิศวกรจบใหม่ ตอนนี้น้องๆ คงจะเข้าใจแล้วว่า Access Time, Latency และคำว่า TMR มันมีความหมายลึกซึ้งและเชื่อมโยงกับสมรรถนะของฮาร์ดดิสก์อย่างไร การที่เราสามารถควบคุมตัวแปรเหล่านี้ให้ได้ตามสเปก คือความงดงามของการประสานศาสตร์ทาง Mechatronics และ Control Systems เข้าด้วยกันครับ
ในตอนต่อไป พี่จะพาน้องๆ ไปเปิดตำราดูสถาปัตยกรรมระดับลึกของการเขียนข้อมูลลงบนแผ่นดิสก์ ว่าสัญญาณไฟฟ้ามันมุดผ่านอากาศไปเรียงอนุภาคแม่เหล็กได้อย่างไร เตรียมตัวดำดิ่งสู่โลกของ Magnetic Recording กันได้เลยครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบ Automation, Machine Vision หรือระบบควบคุมความแม่นยำสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p