ตอนที่ 1: ทำไมโลกนี้ถึงต้องมีระบบควบคุม? (The Genesis of Control Systems)
1. 🎯 ตอนที่ 1: ปฐมบทแห่งระบบควบคุม ทำไมโลกนี้ถึงต้องมีระบบควบคุม?
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับน้องๆ และผู้อ่านทุกท่าน! ยินดีต้อนรับเข้าสู่ซีรีส์ เจาะลึกวิศวกรรมระบบควบคุม (Control Systems) จาก 101 ถึง Advance ในฐานะรุ่นพี่วิศวกรระบบควบคุม วันนี้ผมจะพาทุกคนไปขุดรากถอนโคนกันว่า “ไอ้วิชา Control ที่เรียนกันจนหัวฟูเนี่ย… มันเกิดมาทำไม?”
เชื่อไหมครับว่า ระบบควบคุมไม่ได้เพิ่งเกิดมาพร้อมกับไมโครคอนโทรลเลอร์หรือคอมพิวเตอร์ แต่มันมีมาตั้งแต่ยุคกรีกโบราณ! ราวๆ 250 ปีก่อนคริสตกาล Ktesibios ได้ประดิษฐ์ “นาฬิกาน้ำ” ที่ใช้กลไกลูกลอยควบคุมอัตราการไหลของน้ำให้คงที่ ซึ่งถือเป็นระบบ Feedback Control ระบบแรกของโลก
กาลเวลาผ่านไปจนถึงยุคปฏิวัติอุตสาหกรรมในปี ค.ศ. 1788 James Watt เจอปัญหาปวดหัวคือ เครื่องจักรไอน้ำหมุนเร็วเกินไปเมื่อโหลดน้อย และหมุนช้าลงเมื่อโหลดหนัก เขาจึงประดิษฐ์ “ลูกเหวี่ยงหนีศูนย์ (Centrifugal Governor)” ที่พอเครื่องหมุนเร็ว ลูกตุ้มจะกางออกแล้วไปดึงวาล์วให้ปิดไอดีน้อยลง ทำให้เครื่องยนต์รักษาความเร็วรอบให้คงที่ได้อัตโนมัติ โดยไม่ต้องใช้คนคอยเฝ้าวาล์วเลย!
จากลูกลอยในอดีต สู่ระบบนำทางกระสวยอวกาศ (Space Shuttle) หุ่นยนต์อุตสาหกรรม และรถยนต์ไร้คนขับในปัจจุบัน ทั้งหมดนี้ล้วนถูกขับเคลื่อนด้วยหัวใจเดียวกัน นั่นคือศาสตร์ที่เรียกว่า Control Systems ครับ
3. 🧠 แก่นวิชา (Core Concepts)
แล้ว “ระบบควบคุม” คืออะไรกันแน่? ในทางวิศวกรรม ระบบควบคุม (Control System) คือการนำระบบย่อย (Subsystems) และกระบวนการ (Processes หรือ Plants) มาประกอบเข้าด้วยกัน เพื่อบังคับให้ “เอาต์พุต (Output)” ของระบบมีพฤติกรรมตาม “เป้าหมาย (Desired Input)” ที่เรากำหนดไว้
เปรียบเทียบง่ายๆ กับร่างกายมนุษย์ ซึ่งเป็นระบบควบคุมที่ล้ำหน้าที่สุดในโลก เช่น ตับอ่อนที่คอยหลั่งอินซูลินเพื่อควบคุมระดับน้ำตาลในเลือด หรือดวงตาที่กรอกตามมองวัตถุที่กำลังเคลื่อนที่
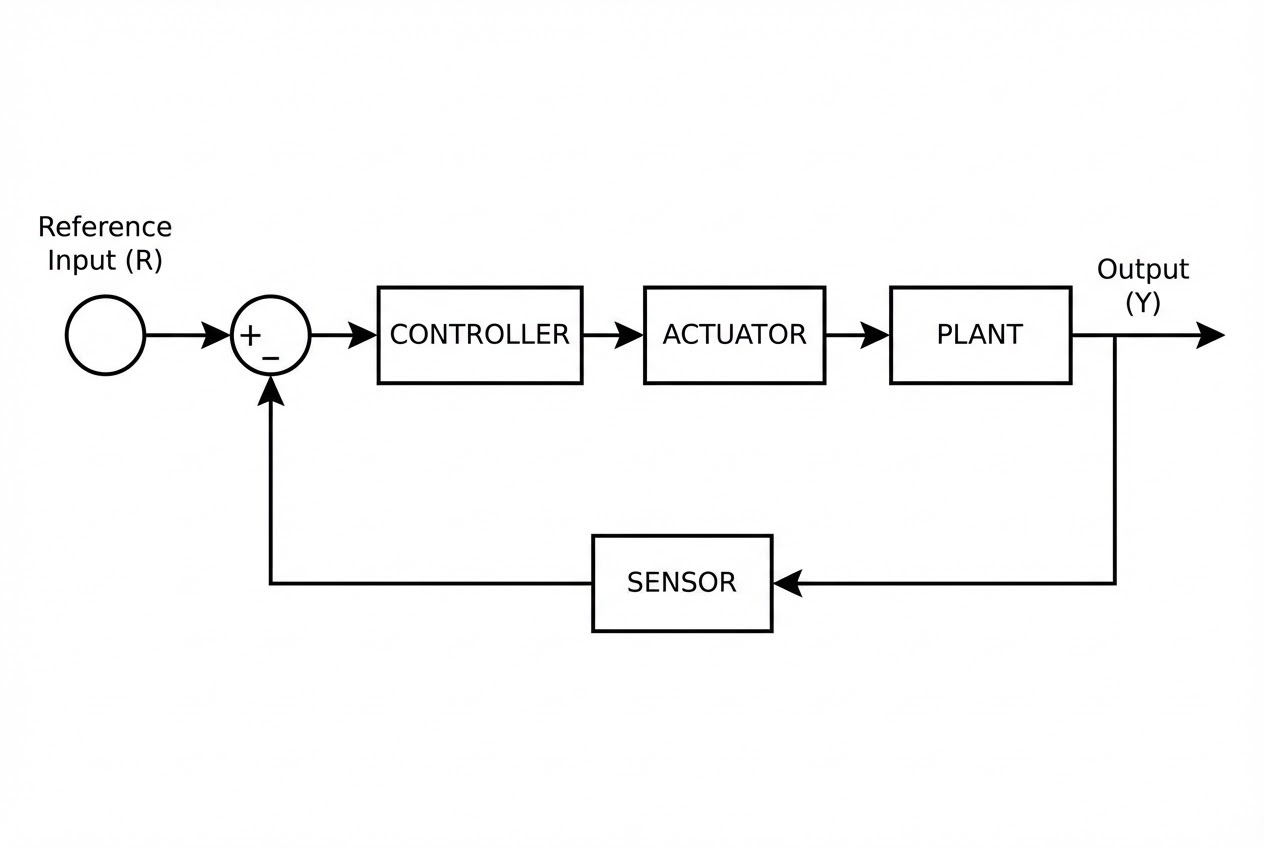
ในเชิงอุตสาหกรรม เราแบ่งองค์ประกอบหลักๆ ของระบบออกเป็น:
- Plant / Process: เครื่องจักรหรือกระบวนการทางฟิสิกส์ที่เราต้องการควบคุม (เช่น มอเตอร์, เตาอบ, หรือรถ AGV)
- Controlled Variable $y(t)$: ค่าที่เราต้องการควบคุม (เช่น ความเร็ว, อุณหภูมิ, หรือตำแหน่ง)
- Reference Input / Setpoint $r(t)$: ค่าเป้าหมายที่เราอยากให้ระบบเป็น
- Control Variable / Manipulated Variable $u(t)$: สัญญาณหรือพลังงานที่ส่งไปสั่งงาน Plant (เช่น แรงดันไฟฟ้า, อัตราการจ่ายน้ำมัน)
- Disturbances $w(t)$ หรือ $d(t)$: สัญญาณรบกวนที่คาดเดาไม่ได้ (เช่น ลมพัดโดรน, พื้นขรุขระ)
4. 🧮 ร่ายมนต์สมการและโค้ดควบคุม (The Math & Implementation)
หัวใจสำคัญที่ทำให้ระบบควบคุม “ฉลาด” คือการคำนวณหา ค่าความผิดพลาด (Error) แล้วนำไปสร้างสัญญาณสั่งงาน $u(t)$ ครับ
สมการคลาสสิกที่สุดในโลกของ Closed-loop Control คือ: $$ e(t) = r(t) - y(t) $$ โดยที่:
- $e(t)$ คือ Error (ค่าความผิดพลาด ณ เวลา $t$)
- $r(t)$ คือ Reference (ค่าเป้าหมาย)
- $y(t)$ คือ Measured Output (ค่าที่เซ็นเซอร์วัดได้จริง)
หน้าที่ของวิศวกรอย่างเรา คือการออกแบบสมการคณิตศาสตร์ (Controller Algorithm) ที่จะเปลี่ยน $e(t)$ ให้เป็น $u(t)$ เพื่อป้อนให้เครื่องจักร ลองดูตัวอย่าง Pseudo-code ง่ายๆ ของลูปควบคุมบนไมโครคอนโทรลเลอร์กันครับ:
// ตัวอย่าง Control Loop พื้นฐาน (C/C++)
void Control_Loop() {
while(1) {
// 1. อ่านค่าจากเซ็นเซอร์ (Sensor Measurement)
float y_t = Read_Sensor();
// 2. คำนวณความผิดพลาด (Calculate Error)
float e_t = r_t - y_t; // e(t) = r(t) - y(t)
// 3. ประมวลผลผ่าน Controller (เช่น เอาไปคูณค่า Gain P ง่ายๆ)
float u_t = Kp * e_t; // u(t) = f(e(t))
// 4. สั่งงาน Actuator (ส่งสัญญาณไปควบคุม Plant)
Drive_Motor(u_t);
// 5. รอจนกว่าจะถึงรอบเวลาถัดไป (Sample Time)
Wait_For_Next_Tick();
}
}5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
แล้วทำไมเราถึงต้องเหนื่อยเขียนโค้ดและแก้สมการ Differential อันซับซ้อนเหล่านี้? ทำไมอุตสาหกรรมถึงขาด Control Systems ไม่ได้? นี่คือเหตุผลหลักๆ ครับ:
- ⚡ Power Amplification (การขยายกำลัง): ระบบควบคุมช่วยให้เราใช้พลังงานเพียงเล็กน้อยในการควบคุมพลังงานมหาศาลได้ เช่น การหมุนลูกบิดเบาๆ เพื่อหันจานเรดาร์ขนาดยักษ์ หรือการบังคับหางเสือเรือรบ
- 🎮 Remote Control (การควบคุมระยะไกล): ช่วยให้หุ่นยนต์เข้าไปทำงานในพื้นที่อันตราย เช่น สภาพแวดล้อมที่มีสารกัมมันตรังสี หรือการส่งยานอวกาศไปดาวอังคาร โดยที่มนุษย์สามารถควบคุมความแม่นยำได้จากระยะไกล
- 🛡️ Compensation for Disturbances (การชดเชยสัญญาณรบกวน): โลกความจริงไม่เคยสมบูรณ์แบบ ระบบควบคุมที่ดีจะชดเชยแรงลมที่พัดเสาอากาศ หรือโหลดที่เปลี่ยนไปของมอเตอร์ ให้ระบบยังคงทำงานได้ตรงตามเป้าหมาย
- 📉 ปรับปรุงคุณภาพและเศรษฐศาสตร์การผลิต (Product Quality & Economy): การควบคุมที่แม่นยำช่วยลดความคลาดเคลื่อน (Variance) ของสินค้า (เช่น ความหนาของเหล็กแผ่น หรือส่วนผสมของปุ๋ยเคมี) ทำให้ของเสียน้อยลงและเพิ่มกำไรให้โรงงาน
- 🦺 ความปลอดภัยและความเป็นไปได้ (Security & Feasibility): เครื่องจักรบางอย่าง เช่น เครื่องบินขับไล่รุ่นใหม่ หรือเครื่องปฏิกรณ์เคมี มีความไร้เสถียรภาพตามธรรมชาติ (Unstable by nature) หากไม่มีระบบควบคุมอัตโนมัติมาคอยประคอง มนุษย์จะไม่มีทางควบคุมมันได้ทันเวลาเลย
6. 🏁 บทสรุป (To be continued…)
จะเห็นได้ว่า วิศวกรรมระบบควบคุม (Control Systems) ไม่ใช่แค่เรื่องของการคำนวณตัวเลขบนกระดาน แต่เป็น “กาว” ที่เชื่อมโยงระหว่างศาสตร์ทางฟิสิกส์ อิเล็กทรอนิกส์ และซอฟต์แวร์ เข้าไว้ด้วยกัน เพื่อเนรมิตให้เครื่องจักรมีชีวิตและมีความคิดในการแก้ไขปัญหาด้วยตัวมันเอง
ในตอนต่อไป เราจะมาเจาะลึกกันว่า ถ้าเราอนุญาตให้เครื่องจักรรับรู้ผลงานตัวเอง (Closed-loop) กับการสั่งแล้วปล่อยทิ้งไว้ (Open-loop) พฤติกรรมของมันจะแตกต่างกันอย่างไร? ติดตามกันในตอนที่ 2 ครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบควบคุม (Control Systems), หุ่นยนต์อัตโนมัติ (Robotics) หรือพัฒนาระบบ Automation ขั้นสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p