ตอนที่ 12: PID เหมาะกับงานแบบไหน และไม่เหมาะกับอะไร? (Use Cases & Limitations)
1. 🎯 ตอนที่ 12: PID เหมาะกับงานแบบไหน และไม่เหมาะกับอะไร?
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับน้องๆ และนักพัฒนาทุกท่าน! กลับมาลุยกันต่อในซีรีส์ เจาะลึกวิศวกรรมระบบควบคุม (Control Systems) จาก 101 ถึง Advance ครับ
จากตอนที่ผ่านๆ มา เราได้เห็นความเก่งกาจของ PID Controller กันไปแล้วใช่มั้ยครับ? จากสถิติในวงการอุตสาหกรรม (Industrial Automation) กว่า 90-95% ของลูปควบคุมทั้งหมด ล้วนถูกขับเคลื่อนด้วยสมการ PID ทั้งสิ้น ไม่ว่าจะเป็นการคุมความร้อนในเตาอบ หรือการคุมความเร็วมอเตอร์ในหุ่นยนต์
แต่คำถามคือ… “ถ้า PID มันเก่งขนาดนั้น ทำไมโลกนี้ถึงยังมีทฤษฎีการควบคุมขั้นสูงอื่นๆ (Modern Control / Robust Control) ให้เราต้องปวดหัวเรียนกันอีก?” คำตอบก็คือ แม้ PID จะเป็นเหมือน “ยาสามัญประจำบ้าน” แต่มันก็ไม่ใช่ “ยาวิเศษที่รักษาได้ทุกโรค” ครับ วันนี้พี่จะพาทุกคนไปกางตำราดูว่า งานแบบไหนที่ PID เอาอยู่สบายๆ และงานแบบไหนที่เราควรจะวาง PID ทิ้งไป แล้วหันไปหาเครื่องมืออื่นแทน เพื่อให้เรามีกรอบแนวคิดในการนำไปประยุกต์ใช้งานจริงได้อย่างถูกต้องครับ
3. 🧠 แก่นวิชา (Core Concepts)
ในโลกของทฤษฎีการควบคุม เราสามารถแบ่งประเภทของงานที่ PID ทำได้ดี และงานที่ PID เริ่มจะแสดงจุดอ่อน ออกเป็น 2 ฝั่งดังนี้ครับ:
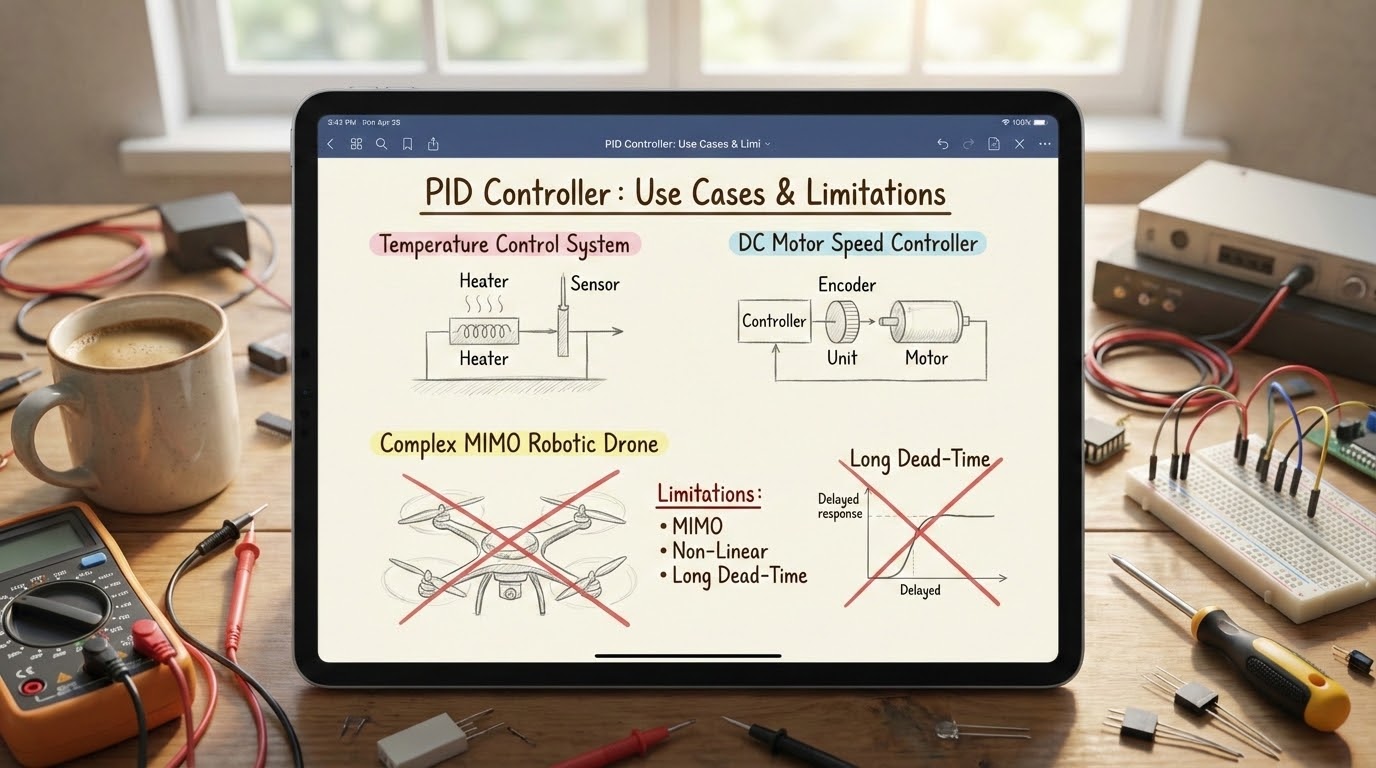
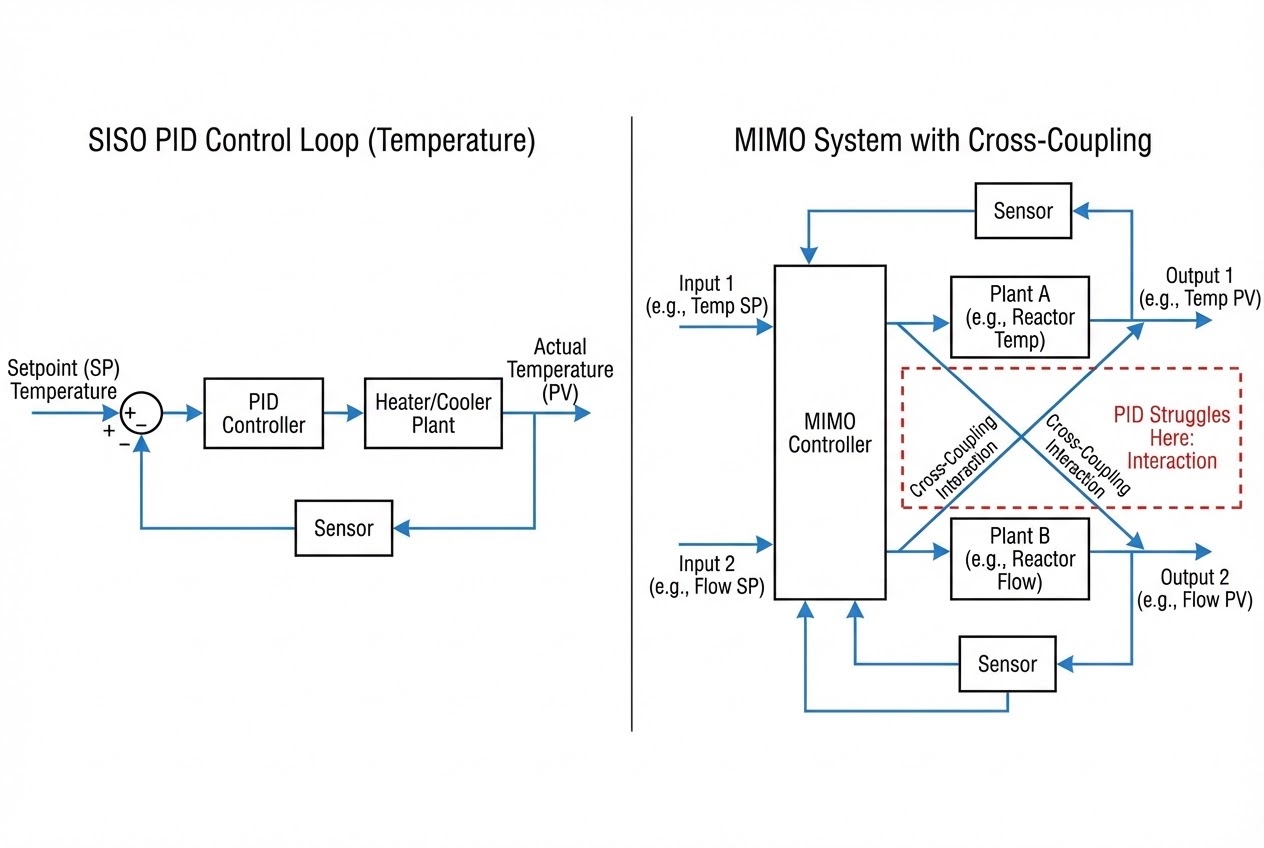
✅ งานที่ PID เป็น “พระเอก” (Suitable Use Cases) PID จะทำงานได้ดีเยี่ยมกับระบบที่มีพลวัต (Dynamics) ไม่ซับซ้อนมากนัก โดยเฉพาะระบบที่เป็น SISO (Single-Input Single-Output) หรือมีอินพุตเดียวและเอาต์พุตเดียว:
- Process Control (การควบคุมกระบวนการ): งานพื้นฐานในโรงงาน เช่น การควบคุมอุณหภูมิ (Temperature), ความดัน (Pressure), อัตราการไหล (Flow rate), ระดับน้ำ (Level) และค่าความเป็นกรด-ด่าง (pH) งานพวกนี้ส่วนใหญ่มักจะเป็นระบบอันดับหนึ่ง (First-order system) หรืออันดับสอง ซึ่ง PID (หรือแค่ PI) ก็เอาอยู่สบายๆ
- Motor Control (การควบคุมมอเตอร์): การควบคุมความเร็วรอบ (Velocity Control) และตำแหน่ง (Position Control) ของ DC Motor หรือ Servo Motor ในหุ่นยนต์อุตสาหกรรม การทำงานร่วมกันของ P, I, และ D สามารถสยบความเฉื่อยของมอเตอร์ได้อย่างแม่นยำ
- ระบบที่ไม่มี Mathematical Model: ข้อดีสูงสุดของ PID คือมันเป็น “Black-box Controller” เราไม่จำเป็นต้องรู้สมการฟิสิกส์ (Transfer Function, $G(s)$) ของ Plant อย่างละเอียด ขอแค่วัดค่า PV (Process Variable) และสั่งการ MV (Manipulated Variable) ได้ เราก็สามารถใช้วิธี Trial and Error หรือ Ziegler-Nichols ในการจูนได้เลย
❌ งานที่ PID เป็น “ตัวถ่วง” (Limitations & Weaknesses) PID จะเริ่มไปไม่รอดเมื่อเจอกับกระบวนการที่มีความท้าทายทางคณิตศาสตร์ดังต่อไปนี้:
- ระบบที่มี Time Delay หรือ Dead Time สูง: ถ้าระบบของคุณมีระยะเวลาหน่วงนานมาก (เช่น การคุมส่วนผสมสารเคมีในท่อที่ยาวมาก) กว่าเซ็นเซอร์จะรับรู้ว่าเกิดการเปลี่ยนแปลง ตัว PID ก็บวกค่าสะสม Error จนสั่งงานเพี้ยนไปแล้ว (เกิด Overshoot อย่างรุนแรง)
- ระบบ MIMO (Multi-Input Multi-Output): ระบบที่มีหลายอินพุตและหลายเอาต์พุตที่ “กวนกันเอง (Cross-coupling/Interacting loops)” เช่น หุ่นยนต์โดรน (Quadcopters) ขั้นสูง หรือหอกลั่นน้ำมัน (Distillation Column) การปรับวาล์ว A อาจไปกระทบความดัน B ทำให้ PID แบบคลาสสิกที่มองแค่ 1-to-1 สับสนได้
- ระบบ Non-linear ขั้นรุนแรง: สมการ PID เป็น Linear Controller (พารามิเตอร์คงที่) ถ้าระบบของคุณมีพฤติกรรมเปลี่ยนไปตามอุณหภูมิหรือสภาวะแวดล้อมอย่างรุนแรง ค่า $K_p, K_i, K_d$ ที่เคยจูนไว้ดีๆ จะใช้ไม่ได้ผลทันที
4. 🧮 ร่ายมนต์สมการและโค้ดควบคุม (The Math & Implementation)
มาดูคณิตศาสตร์กันสักนิดครับว่าทำไม PID ถึงแพ้ทาง “Time Delay (Dead Time)”
สมการของ PID พื้นฐานในโดเมนเวลาคือ: $$ u(t) = K_p e(t) + K_i \int_{0}^{t} e(\tau) d\tau + K_d \frac{de(t)}{dt} $$
และสมมติว่าเรามี Plant (กระบวนการ) ที่เป็น First-order system แต่มี Dead time ซ่อนอยู่ ซึ่งอธิบายด้วย Transfer Function ได้เป็น: $$ G_p(s) = \frac{K e^{-L s}}{\tau s + 1} $$ โดยที่เทอม $e^{-L s}$ คือความล่าช้าทางเวลา (Time delay) จำนวน $L$ วินาที
ปัญหาคืออะไร? ตัว PID Controller จะพยายามคำนวณสัญญาณสั่งงาน $u(t)$ จากค่า Error ใน “ปัจจุบัน” แต่ Plant ดันเอาสัญญาณ $u(t)$ ไปเก็บไว้ในกระเป๋า แล้วอีก $L$ วินาทีค่อยแสดงผลออกมาที่เอาต์พุต $y(t)$ เมื่อเอาต์พุตยังไม่ขยับ (เพราะติด Delay) ค่า Error $e(t)$ ก็ยังคงสูงอยู่ เทอม Integral ($K_i$) ก็จะยิ่งทำหน้าที่ของมันคือ “สะสมก้อน Error” ให้ใหญ่ขึ้นเรื่อยๆ (Integral Windup) พอเวลาผ่านไป $L$ วินาที พลังงานที่สะสมไว้ทะลุหลอดก็ถูกปลดปล่อยออกมาพร้อมกัน ทำให้ระบบระเบิดตู้ม! พุ่งทะลุ Setpoint (Overshoot) ไปไกลลิบเลยครับ!
นี่คือเหตุผลที่วิศวกรระบบควบคุมต้องใช้เทคนิคขั้นสูงอย่าง Smith Predictor หรือ Model Predictive Control (MPC) เข้ามาจัดการกับระบบที่มี Dead time สูงๆ แทนที่จะดันทุรังใช้ PID เปล่าๆ ครับ
5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
ในฐานะวิศวกรหน้างาน นี่คือเคล็ดลับ (Pro-Tips) ที่เรามักจะใช้เพื่อรีดเร้นประสิทธิภาพของ PID หรือเสริมเกราะให้มันเมื่อเจองานที่ท้าทายครับ:
- สัจธรรมแห่ง PI Control: ในงาน Process Control เช่น การคุมระดับน้ำ (Level) หรืออัตราการไหล (Flow) กว่า 90% เรามักจะ ปิดค่า D ทิ้งไป (ใช้แค่ PI Control) ครับ! เพราะเซ็นเซอร์พวกนี้มักจะมีสัญญาณรบกวน (Noise) สูงมาก การใช้เทอม D จะไปขยาย Noise ทำให้วาล์วของคุณสั่นกระพือจนพังได้
- Gain Scheduling (การเปลี่ยนเกียร์ให้สมองกล): ถ้าระบบมีความเป็น Non-linear (เช่น คุมความร้อนที่อุณหภูมิต่ำตอบสนองช้า แต่อุณหภูมิสูงตอบสนองเร็ว) เราจะแก้จุดอ่อนนี้โดยการทำ “ตารางค่า PID” ไว้หลายๆ ชุด (Gain Scheduling) เมื่อระบบทำงานในย่าน A ก็ดึงค่า PID ชุด A มาใช้ เมื่อข้ามไปย่าน B ก็สลับไปใช้ PID ชุด B เพื่อหลอกให้ PID กลายเป็น Non-linear controller ได้
- Feedforward + PID: ถ้ามีสิ่งรบกวน (Disturbances) ที่เรารู้ล่วงหน้าว่ามันจะมาแน่ๆ เราจะไม่รอให้เกิด Error ก่อนแล้วค่อยให้ PID จัดการ แต่เราจะสร้างเส้นทาง Feedforward บวกพลังงานชดเชยเข้าไปที่เอาต์พุตล่วงหน้าเลย วิธีนี้ใช้บ่อยมากในการคุมมอเตอร์แบบ Position Control (ชดเชยแรงโน้มถ่วงล่วงหน้า)
6. 🏁 บทสรุป (To be continued…)
สรุปได้ว่า PID Controller คือนักสู้ที่แข็งแกร่ง ซื่อตรง และไว้ใจได้ที่สุดสำหรับงานทั่วไป (SISO, Linear, Dynamics พื้นฐาน) แต่มันก็ไม่ใช่พระเจ้า หากเราต้องไปรับมือกับระบบที่สลับซับซ้อน (MIMO), มี Time delay สูง, หรือมีข้อจำกัดทางสภาพแวดล้อมที่โหดร้าย เราก็ควรพิจารณาขยับไปใช้เทคนิคขั้นสูงอย่าง State-Space, LQR (Linear Quadratic Regulator) หรือ MPC ครับ
เมื่อเราเข้าใจกรอบการใช้งานของมันแล้ว คำถามต่อไปที่เป็นไม้เบื่อไม้เมาของวิศวกรก็คือ “แล้วเราจะหาค่า $K_p, K_i, K_d$ ที่สมบูรณ์แบบได้อย่างไร?” ในตอนต่อไป เราจะมาเปิดคัมภีร์การจูนพารามิเตอร์ระดับตำนานอย่าง Ziegler-Nichols Method ไปจนถึงการทำ Auto-tuning ห้ามพลาดเด็ดขาดครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบควบคุม (Control Systems), หุ่นยนต์อัตโนมัติ (Robotics) หรือพัฒนาระบบ Automation ขั้นสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p