ตอนที่ 2: ระบบเปิด (Open-loop) vs ระบบปิด (Closed-loop) ความต่างที่ตัดสินชะตาของเครื่องจักร
1. 🎯 ตอนที่ 2: ระบบเปิด (Open-loop) vs ระบบปิด (Closed-loop) ความต่างที่ตัดสินชะตาของเครื่องจักร
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับผู้อ่านทุกท่าน! กลับมาพบกันอีกครั้งในซีรีส์ เจาะลึกวิศวกรรมระบบควบคุม (Control Systems) จาก 101 ถึง Advance
ในฐานะวิศวกร คุณเคยสงสัยไหมครับว่าทำไมเครื่องปิ้งขนมปังถึงชอบทำขนมปังไหม้ถ้าเราตั้งเวลาผิด ในขณะที่เครื่องปรับอากาศ (แอร์) ในห้องทำงานของเรากลับสามารถรักษาความเย็นให้คงที่ได้ตลอดทั้งวันไม่ว่าข้างนอกจะร้อนแค่ไหน? หรือทำไมหุ่นยนต์อุตสาหกรรมราคาแพงถึงทำงานได้เป๊ะระดับมิลลิเมตร ในขณะที่รถของเล่นวิ่งชนกำแพงแล้วล้อก็ยังหมุนฟรีอยู่แบบนั้น?
ความลับของความฉลาดในเครื่องจักรเหล่านี้ ไม่ได้อยู่ที่กลไกทางกลเพียงอย่างเดียวครับ แต่อยู่ที่ “ปรัชญาการออกแบบระบบควบคุม” ว่าเราอนุญาตให้เครื่องจักร “รับรู้ผลงานของตัวเอง” หรือไม่ วันนี้พี่จะพาทุกคนไปผ่าโครงสร้างสมองของเครื่องจักร ทำความรู้จักกับระบบควบคุม 2 ขั้วตรงข้าม นั่นคือ ระบบเปิด (Open-loop) และ ระบบปิด (Closed-loop) ที่เป็นรากฐานสำคัญของการทำ Automation ในยุคปัจจุบันครับ
3. 🧠 แก่นวิชา (Core Concepts)
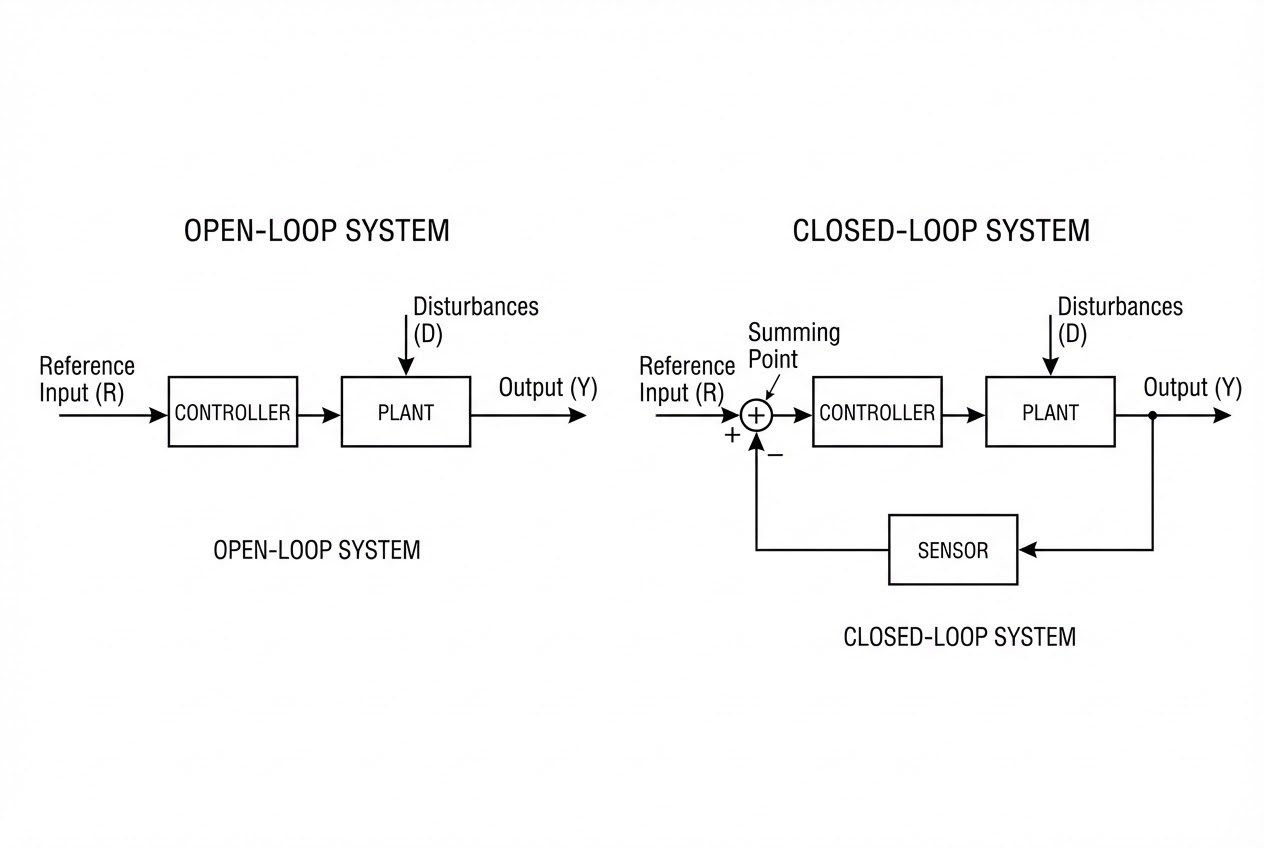
ในโลกของ Control Theory เราแบ่งสถาปัตยกรรมการควบคุมหลักๆ ออกเป็น 2 ประเภท โดยใช้ “การป้อนกลับ (Feedback)” เป็นตัวแบ่งครับ
1. ระบบควบคุมแบบเปิด (Open-loop Control Systems) ระบบนี้คือระบบที่ “สั่งแล้วจบ” (Shoot and Forget) เอาต์พุตของระบบจะไม่มีผลต่อการสั่งการควบคุมเลย หรือพูดง่ายๆ คือไม่มีการวัดผลและไม่มีการนำผลมาเปรียบเทียบกับค่าที่ตั้งไว้ (Reference Input)
- ตัวอย่างในชีวิตจริง: พัดลมตั้งโต๊ะ เรากดเบอร์ 3 พัดลมก็หมุนด้วยความเร็วเท่าเดิมไปเรื่อยๆ ไม่ว่าอากาศในห้องจะร้อนหรือหนาว หรือเครื่องซักผ้ารุ่นเก่าที่ทำงานตามเวลา (Time basis) โดยไม่สนใจว่าเสื้อผ้าจะสะอาดหรือยัง
- ข้อดี (Pros): โครงสร้างเรียบง่าย (Simple construction), บำรุงรักษาง่าย, ราคาถูก, และ ไม่มีปัญหาเรื่องเสถียรภาพ (No stability problem)
- ข้อเสีย (Cons): ขาดความแม่นยำ หากมีสัญญาณรบกวน (Disturbance) จากภายนอก เช่น ไฟตก หรือกลไกฝืด ระบบจะไม่สามารถแก้ไขตัวเองได้เลย และต้องคอยปรับเทียบ (Calibration) อยู่เสมอ
2. ระบบควบคุมแบบปิด (Closed-loop Control Systems / Feedback Control) ระบบนี้คือระบบที่ “ทำงานไป วัดผลไป” โดยจะพยายามรักษาความสัมพันธ์ระหว่างเอาต์พุต (Output) และค่าอ้างอิง (Reference Input) ให้ตรงกันเสมอ โดยการนำค่าทั้งสองมาเปรียบเทียบกันเพื่อหา “ความผิดพลาด (Error)” แล้วใช้ค่า Error นี้ไปปรับการทำงานของระบบ
- ตัวอย่างในชีวิตจริง: เครื่องปรับอากาศ (แอร์) ที่มีเทอร์โมสตัทคอยวัดอุณหภูมิห้อง (Actual Temperature) มาเทียบกับอุณหภูมิที่ตั้งไว้ (Set Point) ถ้าห้องร้อนไป แอร์ก็เร่งความเย็น ถ้าห้องเย็นพอแล้ว แอร์ก็ตัดการทำงาน หรือระบบ Cruise Control ในรถยนต์
- ข้อดี (Pros): ต้านทานต่อสัญญาณรบกวนภายนอก (External disturbances) ได้ดีมาก, ลดผลกระทบจากการเปลี่ยนแปลงพารามิเตอร์ภายในระบบ ทำให้เราสามารถควบคุมระบบได้อย่างแม่นยำแม้จะใช้อุปกรณ์ที่ไม่ได้แม่นยำสูงสุดก็ตาม
- ข้อเสีย (Cons): มีความซับซ้อน ราคาสูง เพราะต้องมีเซ็นเซอร์ (Sensor) และที่สำคัญที่สุดคือ มีปัญหาด้านเสถียรภาพ (Stability problem) หากจูนไม่ดีระบบอาจจะแกว่ง (Oscillate) หรือควบคุมไม่ได้
4. 🧮 ร่ายมนต์สมการและโค้ดควบคุม (The Math & Implementation)
ในมุมมองของคณิตศาสตร์วิศวกรรม เราจะอธิบายความต่างนี้ผ่าน Transfer Function (ฟังก์ชันถ่ายโอน) ในโดเมนความถี่ (s-domain) ครับ
สำหรับ Open-loop System: ถ้าเรามีตัวควบคุม (Controller) $G_c(s)$ และกระบวนการ (Plant) $G_p(s)$ เรียงต่อกัน (Cascade) สัญญาณเอาต์พุต $C(s)$ จะขึ้นอยู่กับอินพุต $R(s)$ ตรงๆ ตามสมการ: $$ C(s) = G_c(s) G_p(s) R(s) $$ จะเห็นว่าถ้า Plant มีปัญหาหรือฝืดลง $G_p(s)$ เปลี่ยนไป $C(s)$ ก็จะเพี้ยนทันทีโดยไม่มีใครช่วยดึงกลับ
สำหรับ Closed-loop System: เมื่อเรานำเซ็นเซอร์ $H(s)$ มาอ่านค่า $C(s)$ แล้วป้อนกลับมาลบออกจากอินพุต $R(s)$ จะเกิด Actuating Error Signal $E(s)$: $$ E(s) = R(s) - H(s)C(s) $$ และทำให้เกิด Closed-Loop Transfer Function ที่สวยงามและทรงพลังที่สุดในโลกวิศวกรรมควบคุม: $$ \frac{C(s)}{R(s)} = \frac{G(s)}{1 + G(s)H(s)} $$ (หมายเหตุ: $G(s)$ คืออัตราขยายรวมในสายไปข้างหน้า หรือ Forward Path)
ตัวอย่าง Implementation ด้วย C/C++ (โครงสร้าง Closed-loop พื้นฐาน): ลองมาดูโค้ดจำลองระบบ Closed-loop แบบง่ายๆ ที่อยู่ใน Microcontroller เช่น STM32 กันครับ
// ตัวแปรสำหรับระบบ Closed-loop
float setpoint = 25.0; // อุณหภูมิเป้าหมาย (Reference Input)
float actual_temp = 0.0; // ค่าที่อ่านได้จริง (Measured Output)
float error = 0.0; // ความผิดพลาด (Actuating Error)
float control_signal = 0.0; // สัญญาณสั่งการ (Control Effort)
while(1) {
// 1. อ่านค่าจาก Sensor (Feedback H(s))
actual_temp = Read_Thermocouple();
// 2. คำนวณ Error: E(s) = R(s) - C(s)H(s)
error = setpoint - actual_temp;
// 3. ประมวลผลใน Controller G_c(s) (เช่น การคูณ Gain ง่ายๆ หรือ PID)
control_signal = Controller_Compute(error);
// 4. สั่งงาน Actuator (Plant G_p(s))
Drive_Heater_PWM(control_signal);
Wait_Next_Sample_Time(); // รอรอบการทำงานถัดไป (dt)
}5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
แล้วทำไมในงานอุตสาหกรรม (Industrial Automation) หรือหุ่นยนต์ขั้นสูง ถึงต้องเน้นใช้ Closed-loop เป็นหลัก?
คำตอบอยู่ในคัมภีร์ลับของ Control Theory ครับ: โลกแห่งความเป็นจริงเต็มไปด้วยสิ่งที่เราคาดเดาไม่ได้ (Unpredictable Disturbances) สมมติว่าเรามีหุ่นยนต์ AGV แบกของในโรงงาน ถ้ารถวิ่งบนพื้นเรียบ Open-loop อาจจะรอด แต่ถ้าเจอพื้นเอียง แบกของหนักขึ้น หรือมีแรงเสียดทานที่ล้อ (Coulomb friction) พารามิเตอร์ของระบบจะเปลี่ยนไปหมด
การป้อนกลับ (Feedback) ใน Closed-loop จะทำหน้าที่หักล้างสัญญาณรบกวนเหล่านี้ทิ้งไป ความงดงามในทางคณิตศาสตร์คือ หากค่าอัตราขยายในลูป (Loop Gain) $G(s)H(s)$ มีค่ามากๆ เมื่อเทียบกับ 1 สมการ Closed-Loop Transfer Function จะกลายเป็น: $$ \frac{C(s)}{R(s)} \approx \frac{G(s)}{G(s)H(s)} = \frac{1}{H(s)} $$ นั่นแปลว่า เอาต์พุตจะไม่สนว่าตัว Plant (เครื่องจักร) $G(s)$ จะเสื่อมสภาพ ฝืด หรือเก่าลงแค่ไหน พฤติกรรมของระบบจะถูกควบคุมโดย Sensor $H(s)$ เท่านั้น! นี่แหละครับเวทมนตร์ของ Closed-loop
แต่ข้อควรระวัง (Pro-Tip): “พลังอันยิ่งใหญ่ มาพร้อมกับปัญหา Stability” หากคุณใช้ Gain ที่สูงเกินไป หรือมี Delay ในระบบมาก (เช่น Sensor อ่านค่าช้า) โพล (Poles) ของระบบใน s-plane อาจจะย้ายไปอยู่ฝั่งขวา (Right-half s-plane) ซึ่งจะทำให้ระบบเกิดการแกว่งขยายตัวขึ้นเรื่อยๆ (Unstable) จนเครื่องจักรพังได้เลยครับ!
6. 🏁 บทสรุป (To be continued…)
สรุปสั้นๆ ครับ: Open-loop เหมือนการขับรถหลับตาเหยียบคันเร่งตามความรู้สึก ส่วน Closed-loop คือการลืมตาขับรถและแตะเบรกหรือคันเร่งตามระยะห่างจากรถคันหน้า แม้ว่า Closed-loop จะออกแบบยากและแพงกว่า แต่เพื่อความแม่นยำและความทนทานต่อสัญญาณรบกวน มันคือไฟลต์บังคับในงานวิศวกรรมขั้นสูงครับ
ในตอนต่อไป เราจะมาเจาะลึกกันว่า “สมอง” ของ Closed-loop ที่ฉลาดที่สุดและนิยมใช้กันมากที่สุดในอุตสาหกรรมอย่าง PID Controller มันมีเวทมนตร์ในการสยบความแกว่งได้อย่างไร รอติดตามกันนะครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบควบคุม (Control Systems), หุ่นยนต์อัตโนมัติ (Robotics) หรือพัฒนาระบบ Automation ขั้นสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p