ตอนที่ 16: ปัญหาใหญ่ของ I: Integral Windup คืออะไร?
1. 🎯 ตอนที่ 16: ปัญหาใหญ่ของ I: Integral Windup คืออะไร?
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับผู้อ่านและน้องๆ วิศวกรทุกท่าน! ยินดีต้อนรับกลับสู่ซีรีส์ เจาะลึกวิศวกรรมระบบควบคุม (Control Systems) จาก 101 ถึง Advance กับพี่วิศวกรคนเดิมครับ
ถ้าน้องๆ จำได้ในตอนที่ 9 พี่ได้ยกย่องให้ตัวควบคุมแบบปริพันธ์ หรือ Integral Control (I-Term) เป็นเหมือน “ฮีโร่ผู้ขจัดความผิดพลาดในอดีต” ที่คอยดันให้ระบบเข้าสู่เป้าหมายจน Steady-state error กลายเป็นศูนย์สนิท
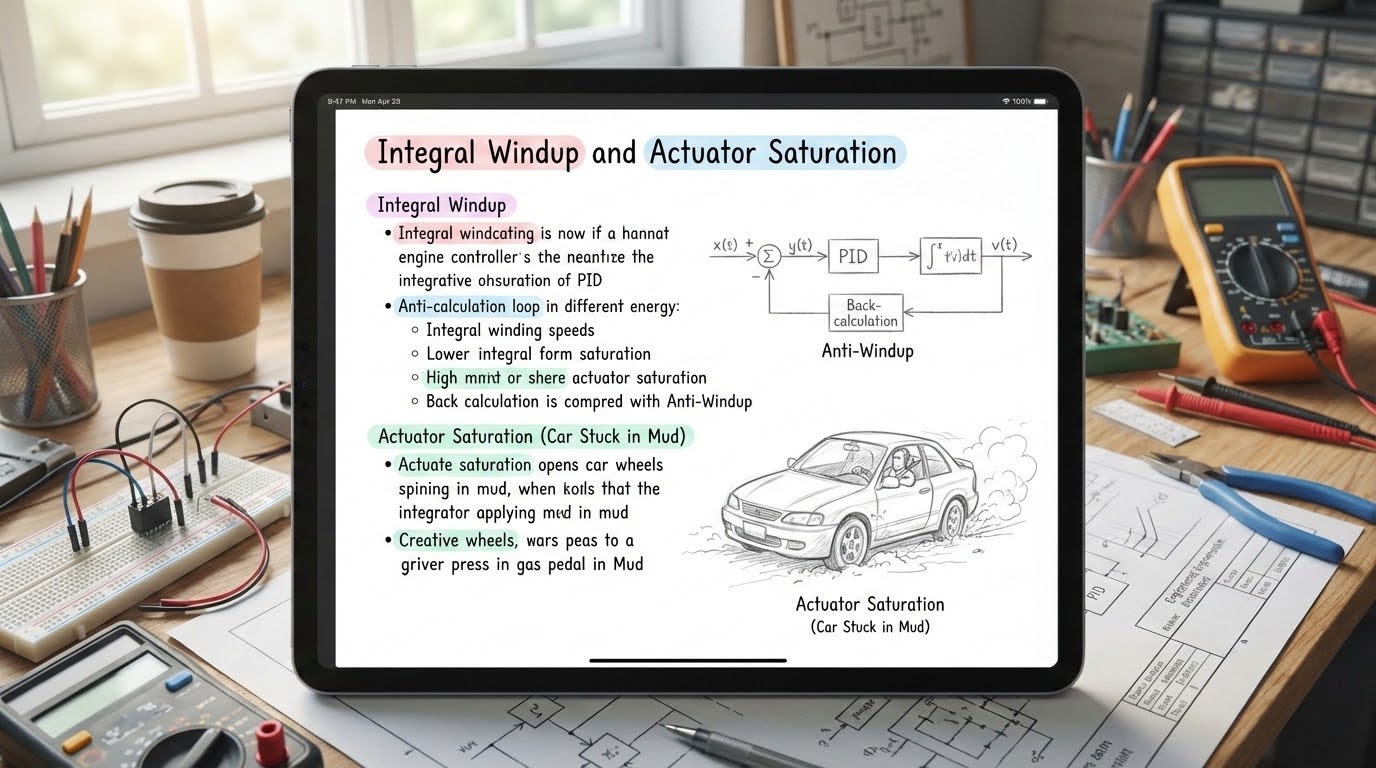
แต่บนโลกแห่งความเป็นจริง ไม่มีฮีโร่คนไหนที่สมบูรณ์แบบครับ! ในระบบควบคุมทางกายภาพ (Physical systems) อุปกรณ์ทุกชิ้นล้วนมีขีดจำกัด ไม่ว่าจะเป็นวาล์วที่เปิดได้สุดแค่ 100%, มอเตอร์ที่รับแรงดันได้สูงสุดแค่ 24V, หรือเพาเวอร์แอมป์ที่จ่ายกระแสได้จำกัด สิ่งนี้เรียกว่า “การอิ่มตัวของแอคชูเอเตอร์ (Actuator Saturation)”
ลองจินตนาการว่าน้องกำลังขับรถขึ้นเขาที่ชันมากๆ แล้วน้องเหยียบคันเร่งมิดไมล์ไปแล้ว 100% แต่รถก็ยังวิ่งไม่ถึงความเร็วเป้าหมาย ในฐานะคนขับ น้องคงรู้ตัวว่ารถมันสุดกำลังแล้ว แต่สำหรับสมองกล (PID) ที่มี I-Term มันไม่รู้ตัวครับ! มันจะเห็นแค่ว่า “ยังมี Error อยู่นี่นา” แล้วมันก็จะพยายามสะสมค่าความผิดพลาดไปเรื่อยๆ จนสั่งคันเร่งทะลุไป 200%… 500%… 1,000% ในใจของมัน!
แล้วจะเกิดอะไรขึ้นเมื่อรถข้ามยอดเขาได้? รถก็จะพุ่งทะยานลงเขาด้วยความเร็วบ้าคลั่ง เพราะสมองกลต้องใช้เวลาอีกพักใหญ่ในการ “ถอน” คันเร่งจำลองที่เหยียบเกินไว้กลับมาที่เดิม ปรากฏการณ์นี้แหละครับที่วงการคอนโทรลเรียกว่า “Integral Windup” หรืออาการ “อินทิเกรตค้างล้น” วันนี้เราจะมาเจาะลึกความน่ากลัวของมันและวิธีปราบมันให้อยู่หมัดกันครับ!
3. 🧠 แก่นวิชา (Core Concepts)
Integral Windup (การอิ่มตัวของตัวปริพันธ์) เกิดขึ้นเมื่อตัวควบคุม PID สั่งงานแอคชูเอเตอร์ (Actuator) จนเกินขีดจำกัด แต่ยังไม่สามารถลดค่าความผิดพลาด (Error) ให้เป็นศูนย์ได้
วงจรแห่งความหายนะทำงานอย่างไร?
- เกิดการอิ่มตัว (Saturation): เมื่อระบบเจอสัญญาณรบกวนขนาดใหญ่ (Large disturbance) หรือมีการเปลี่ยน Setpoint อย่างรวดเร็ว ตัวควบคุมจะคำนวณสัญญาณสั่งงาน $u(t)$ ออกมาสูงมาก จนวาล์วหรือมอเตอร์ถูกดันไปชนขีดจำกัด (เช่น $u_{max}$)
- ลูปขาด (Broken Loop): เมื่อแอคชูเอเตอร์ชนขีดจำกัด การป้อนกลับ (Feedback) ถือว่าถูกตัดขาดชั่วคราว เพราะไม่ว่าตัวควบคุมจะสั่ง $u(t)$ เพิ่มขึ้นไปเท่าไหร่ (เช่น สั่งไป 150%) แอคชูเอเตอร์ก็ยังคงจ่ายพลังงานเท่าเดิม (แค่ 100%) พฤติกรรมของระบบจึงกลายเป็นระบบวงจรเปิด (Open-loop)
- การสะสมที่ไม่สิ้นสุด (Windup): ในขณะที่ระบบไม่สามารถตอบสนองได้ทันใจ ค่า Error ที่เป็นบวกจะยังคงค้างอยู่ I-Term จะทำหน้าที่อินทิเกรตและสะสม Error นี้ให้ใหญ่โตมโหฬารขึ้นเรื่อยๆ ไปกักเก็บไว้ในตัวแปรหน่วยความจำ (Integral state)
- ผลลัพธ์ (The Consequence): เมื่อ Process Variable (PV) ค่อยๆ วิ่งมาจนแตะ Setpoint (Error เป็น 0) แทนที่คันเร่งจะถูกถอนออก ตัว I-Term ที่ถูกสะสมไว้สูงเสียดฟ้าจะยังคงสั่งให้แอคชูเอเตอร์ทำงานที่ 100% ต่อไป! ระบบจะต้องรอจนกว่า PV จะทะลุเป้าหมายไปไกลมากๆ จน Error กลายเป็น “ลบ” เพื่อนำมาหักล้างกับค่าที่สะสมไว้ ผลที่ได้คือเครื่องจักรเกิดการ Overshoot อย่างรุนแรง และแกว่งไปมา (Oscillation) เหมือนการสลับรีเลย์เปิด-ปิด
วิศวกรระบบควบคุมต้องรับมือกับปัญหานี้ด้วยเทคนิค “Anti-windup” ซึ่งเปรียบเสมือน “ท่อน้ำล้น (Overflow outlet)” ในถังน้ำ ที่คอยระบายค่าสะสมทิ้งไปเมื่อระบบเกิดการอิ่มตัวครับ

4. 🧮 ร่ายมนต์สมการและโค้ดควบคุม (The Math & Implementation)
ในโลกของสมการคณิตศาสตร์ เราสามารถโมเดลพฤติกรรมของการอิ่มตัว (Saturation) ได้ดังนี้: $$ u_{sat}(t) = \begin{cases} u_{max} & \text{ถ้า } u(t) > u_{max} \ u(t) & \text{ถ้า } u_{min} \le u(t) \le u_{max} \ u_{min} & \text{ถ้า } u(t) < u_{min} \end{cases} $$ (โดยที่ $u(t)$ คือสัญญาณที่ออกจาก PID และ $u_{sat}(t)$ คือพลังงานที่แอคชูเอเตอร์จ่ายได้จริง)
เพื่อกำจัด Windup เรามีวิธีมาตรฐานที่นิยมใช้ 2 วิธีหลักๆ ครับ:
วิธีที่ 1: Back-Calculation (การคำนวณย้อนกลับ) วิธีนี้ถือเป็นมาตรฐานทองคำในวงการอุตสาหกรรม โดยเราจะนำค่าความแตกต่างระหว่างคำสั่งที่อยากได้ $v = u(t)$ กับพลังงานที่จ่ายได้จริง $u = u_{sat}(t)$ มาสร้างเป็น Error สัญญาณใหม่ $e_s = v - u$ แล้วป้อนกลับไปลดค่าของ Integrator ผ่านค่าคงที่เวลาที่เรียกว่า Tracking Time Constant ($T_t$) สมการที่อินพุตของ Integrator จะเปลี่ยนเป็น: $$ \frac{1}{T_i} e(t) + \frac{1}{T_t} (u_{sat}(t) - u(t)) $$ เมื่อใดที่ระบบอิ่มตัว ค่าเทอมหลังจะติดลบ และไปเบรกไม่ให้ I-Term โตขึ้นครับ
วิธีที่ 2: Conditional Integration / Integrator Clamping (การหยุดอินทิเกรตอย่างมีเงื่อนไข) เป็นวิธีที่ฮิตมากในการเขียน C/C++ บน Microcontroller เพราะเขียนง่ายและใช้พลังประมวลผลน้อย หลักการคือ “ถ้า Output ชนขีดจำกัดแล้ว และ Error ยังมีทิศทางเดียวกับ Output ให้หยุดบวกค่าสะสมเพิ่ม”
ตัวอย่างโค้ด C/C++ (Anti-windup แบบ Clamping):
// ตัวแปรในระบบ (Global Variables)
float Kp = 5.0, Ki = 0.5, Kd = 0.1;
float integral_sum = 0.0;
float prev_error = 0.0;
float dt = 0.01;
float out_max = 100.0; // ขีดจำกัดสูงสุดของ PWM (100%)
float out_min = -100.0; // ขีดจำกัดต่ำสุด (เช่น ขับมอเตอร์ถอยหลัง)
float PID_Compute_AntiWindup(float setpoint, float measured_value) {
float error = setpoint - measured_value;
// 1. P-Term
float P_out = Kp * error;
// 2. I-Term (คำนวณแบบจำลองไปก่อน)
float I_out_test = Ki * (integral_sum + error * dt);
// 3. D-Term
float derivative = (error - prev_error) / dt;
float D_out = Kd * derivative;
// 4. รวมพลัง (Pre-saturation Output)
float output = P_out + I_out_test + D_out;
// 5. ป้องกัน Integral Windup (Integrator Clamping)
// ถ้าระบบไม่ได้สั่งเกินลิมิต ให้บวกค่าสะสมตามปกติ
if (output < out_max && output > out_min) {
integral_sum += error * dt; // อนุญาตให้อินทิเกรต
}
else if (output >= out_max && error < 0.0) {
// ชนเพดานบน แต่ Error ติดลบ (กำลังดึงกลับ) -> อนุญาต
integral_sum += error * dt;
}
else if (output <= out_min && error > 0.0) {
// ชนเพดานล่าง แต่ Error เป็นบวก (กำลังดึงกลับ) -> อนุญาต
integral_sum += error * dt;
}
// หากไม่เข้าเงื่อนไขด้านบน แปลว่า "ชนเพดานและกำลังดันต่อ" -> ห้ามบวกเพิ่ม (Hold)
// อัปเดต I-Term ของจริงเพื่อรวมคำตอบ
float I_out = Ki * integral_sum;
output = P_out + I_out + D_out;
prev_error = error;
// 6. Actuator Saturation (ตัดหัว-ตัดท้ายก่อนส่งให้ Hardware)
if (output > out_max) output = out_max;
if (output < out_min) output = out_min;
return output;
}5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
เวลาที่เราต้องเลือกว่าจะใช้ Anti-windup แบบไหนดี มีเคล็ดลับที่วิศวกรควบคุมตัวจริงมักจะพิจารณาครับ:
- การจูนค่า Tracking Time Constant ($T_t$): ถ้าน้องเลือกใช้วิธี Back-calculation การเลือกค่า $T_t$ สำคัญมากครับ! ถ้าตั้ง $T_t$ เล็กเกินไป (รีเซ็ตเร็วไป) อาจทำให้เกิดปัญหาตอนที่มี Noise จากโหมด D (Derivative) เข้ามา ทำให้มันไปรีเซ็ต I-Term มั่วซั่ว กฎเหล็ก (Rule of thumb) ของอุตสาหกรรมคือควรตั้ง $T_t$ ให้อยู่ระหว่าง $T_d$ และ $T_i$ (เช่น $T_t = \sqrt{T_i T_d}$) ครับ
- Incremental Algorithm (Velocity Form): ถ้ามอเตอร์หรือแอคชูเอเตอร์ที่ใช้ เป็นแบบรับคำสั่ง “ค่าการเปลี่ยนแปลง” (เช่น Step Motor) หรือเขียนโค้ด PID แบบ Incremental (สมการคำนวณ $\Delta u$) ปัญหา Integral Windup จะถูกจัดการโดยธรรมชาติครับ เพราะพอชนลิมิต เราก็แค่ไม่บวก $\Delta u$ เข้าไปในตัวแปรตำแหน่ง ก็จบ! ไม่ต้องเขียน Anti-windup ให้วุ่นวาย
- อย่าลิมิตแค่ Output! (Do not just limit Output):
ความผิดพลาดคลาสสิกของมือใหม่คือ การเขียน
if (out > 100) out = 100;ไว้ที่ท้ายโค้ด PID เฉยๆ โดยไม่กลับไปล็อคตัวแปรintegral_sumจำไว้นะครับว่านั่น ไม่ใช่ Anti-windup ครับ! มันแค่กันมอเตอร์พัง แต่ตัวแปร I ในหน่วยความจำ RAM ของน้องก็ยังบวกทะลุฟ้าอยู่ดี พอ Error กลับทิศเมื่อไหร่ เครื่องจักรพุ่งแน่นอน!
6. 🏁 บทสรุป (To be continued…)
Integral Windup คือภัยเงียบที่รอคอยการทำงานที่ผิดพลาดของระบบ ไม่ว่าจะเป็นจากการเปลี่ยน Setpoint ไกลๆ (Large setpoint changes) หรือจากการเจอสัญญาณรบกวนที่รุนแรง การปล่อยให้สมองกลคำนวณแบบ “โลกสวย” โดยไม่สนใจขีดจำกัดของฮาร์ดแวร์ จะนำไปสู่ความสูญเสียและ Over-shoot ที่อันตราย
ดังนั้น กฎทองคำของ Control Engineer คือ: “ทุกครั้งที่มี I-Term ต้องมี Anti-windup เสมอ!”
ในตอนนี้เราได้เห็นแล้วว่าการอิมพลีเมนต์ PID ในโลกความจริงนั้นซับซ้อนกว่าในสมการบนกระดาษมาก ในตอนต่อไป เราจะมาคุยกันถึงเรื่องของการเชื่อมต่อระบบแบบต่อเนื่อง (Continuous-time) ลงสู่โลกดิจิทัล (Discrete-time) ว่าไมโครคอนโทรลเลอร์อ่านและคำนวณสมการแคลคูลัสได้อย่างไร รอติดตามกันนะครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบควบคุม (Control Systems), หุ่นยนต์อัตโนมัติ (Robotics) หรือพัฒนาระบบ Automation ขั้นสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p