ตอนที่ 9: เจาะลึก I (Integral): นักสะสมความผิดพลาดในอดีต
1. 🎯 ตอนที่ 9: เจาะลึก I (Integral): นักสะสมความผิดพลาดในอดีต
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับผู้อ่านและน้องๆ นักพัฒนาทุกคน! กลับมาพบกันอีกครั้งในซีรีส์ เจาะลึกวิศวกรรมระบบควบคุม (Control Systems) จาก 101 ถึง Advance สไตล์วิศวกรรุ่นพี่ครับ
ในตอนที่แล้ว เราได้เรียนรู้กันไปว่าการควบคุมแบบสัดส่วน หรือ Proportional Control (P-Control) นั้นเปรียบเสมือนฮีโร่ที่ตอบสนองรวดเร็ว แต่กลับมีจุดอ่อนร้ายแรงคือ “ไปไม่ถึงฝั่งฝัน” เพราะมันมักจะทิ้งรอยด่างพร้อยที่เรียกว่า Steady-state error (Offset) เอาไว้เสมอ ลองจินตนาการถึงการขับรถขึ้นเขาด้วยระบบ Cruise Control ดูครับ ถ้ารถใช้แค่ P-Control เมื่อรถวิ่งใกล้ถึงความเร็วเป้าหมาย คันเร่งจะถูกผ่อนลงจนแรงส่งไม่พอที่จะชนะแรงโน้มถ่วง ผลคือรถจะวิ่งด้วยความเร็วที่ “ต่ำกว่าเป้าหมาย” เล็กน้อยไปตลอดกาล
แล้วเราจะทำอย่างไรให้เครื่องจักรมีแรงฮึดเฮือกสุดท้ายเพื่อกำจัดช่องว่างนี้ให้กลายเป็นศูนย์? วันนี้พี่จะพาไปรู้จักกับจิ๊กซอว์ชิ้นสำคัญที่จะมาอุดรอยรั่วนี้ นั่นคือการควบคุมแบบปริพันธ์ หรือ Integral Control (I) ซึ่งเปรียบเสมือน “นักสะสมความผิดพลาดจากอดีต” ที่จะคอยผลักดันระบบจนกว่าความผิดพลาดจะหายไปอย่างหมดจดครับ!
3. 🧠 แก่นวิชา (Core Concepts)
Integral Control (การควบคุมแบบปริพันธ์) คือโหมดการควบคุมที่ถูกสร้างขึ้นมาเพื่อขจัดปัญหา Steady-state error โดยเฉพาะ
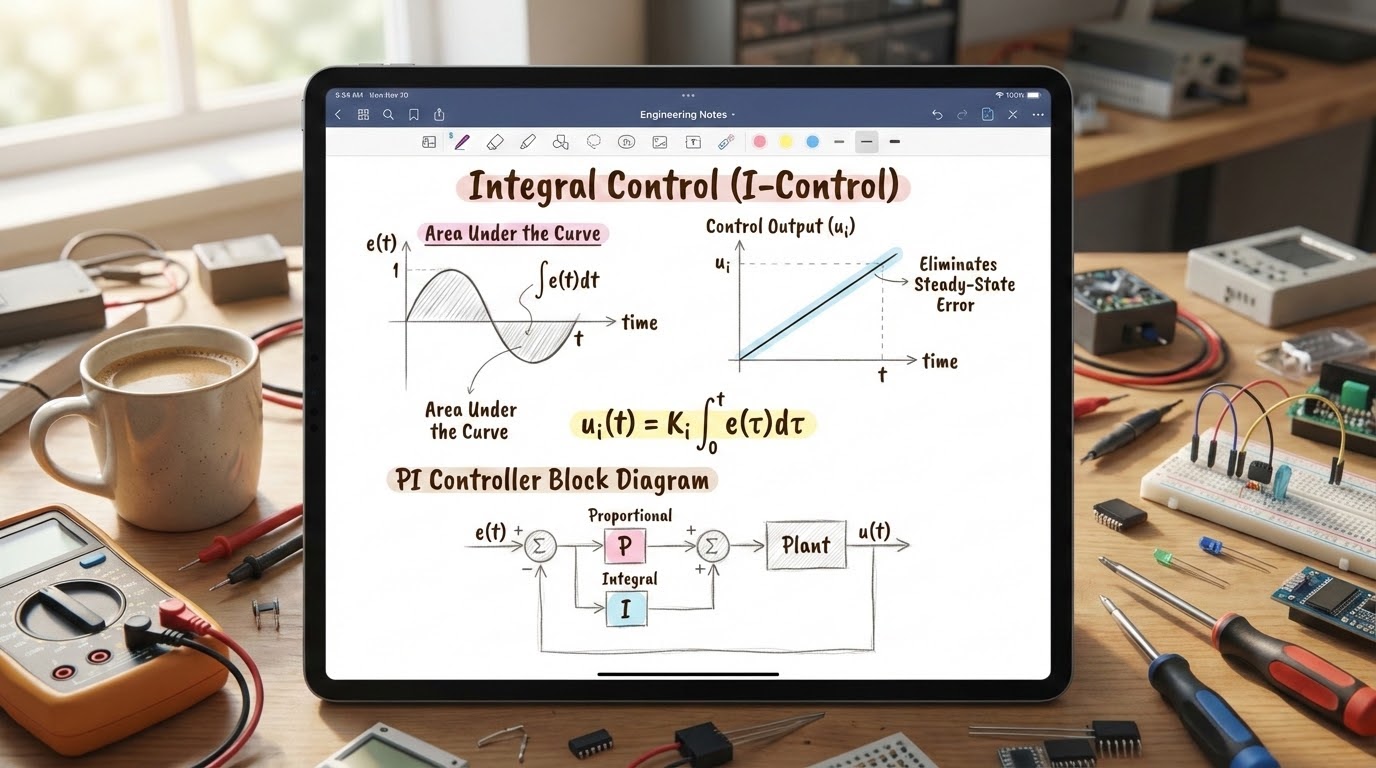
หลักการทำงานของมันคืออะไร? ในทางแคลคูลัส “อินทิกรัล (Integral)” คือการหา “พื้นที่ใต้กราฟ (Area under the curve)” ของฟังก์ชันนั้นๆ สำหรับระบบควบคุม ตัวควบคุมแบบ I จะทำการนำค่าความผิดพลาด (Error) ในแต่ละเสี้ยววินาทีมาบวกสะสมรวมกันไปเรื่อยๆ ตามเวลาที่ผ่านไป (Accumulation)
- ตราบใดที่ยังมีความผิดพลาด: ไม่ว่า Error จะเล็กน้อยแค่ไหน (เช่น รถวิ่งช้ากว่าเป้าหมายแค่ 1 km/h) เมื่อเวลาผ่านไป พื้นที่ใต้กราฟของ Error ก็จะขยายใหญ่ขึ้นเรื่อยๆ
- พลังแห่งการสะสม: ตัวควบคุมแบบ I จะเอาพื้นที่สะสมนี้ไปคูณกับอัตราขยาย ทำให้เกิดแรงสั่งงาน (Control Output) ที่เพิ่มขึ้นอย่างต่อเนื่อง ผลคือคันเร่งจะถูกเหยียบลึกขึ้นเรื่อยๆ จนกว่ารถจะวิ่งถึงความเร็วเป้าหมายเป๊ะๆ
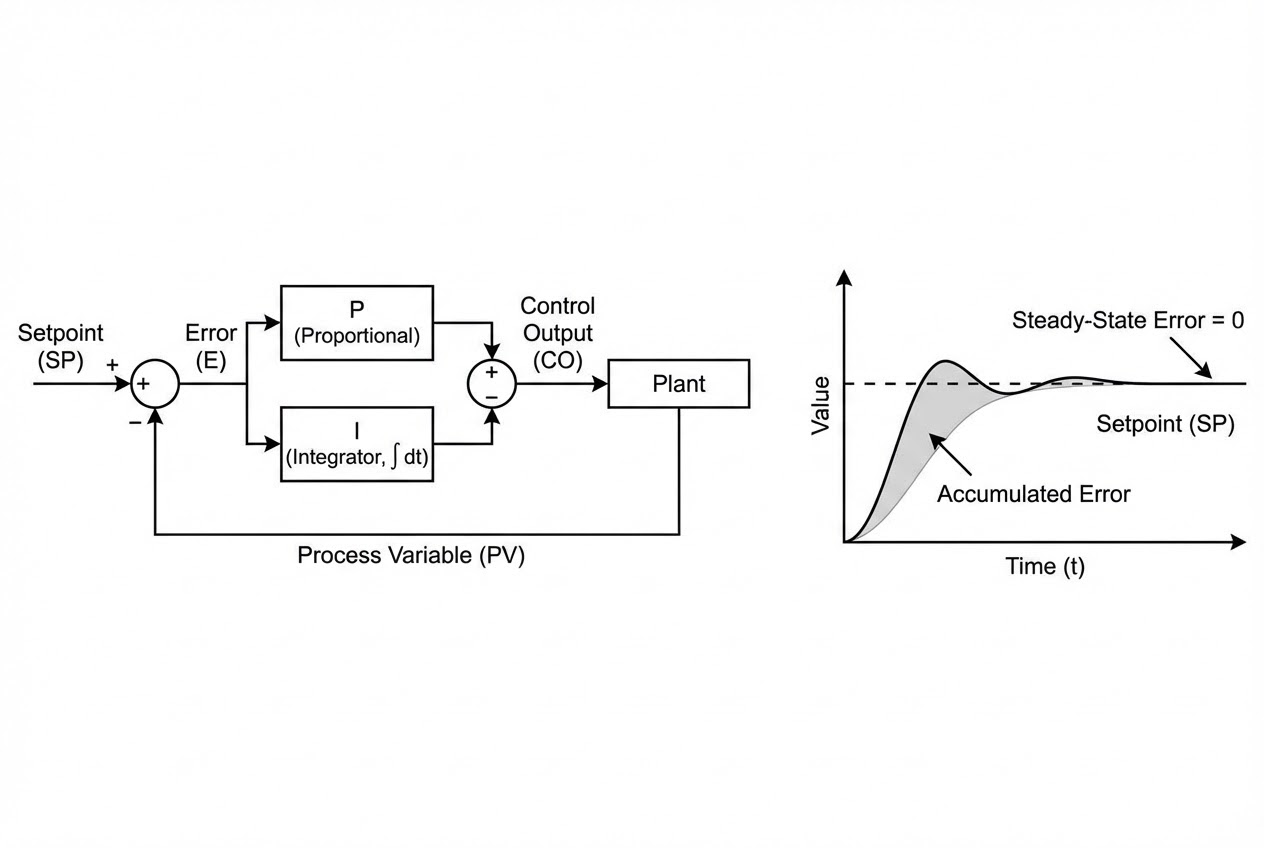
- เมื่อถึงเป้าหมาย: ทันทีที่ Error กลายเป็นศูนย์ การสะสมพื้นที่ใต้กราฟจะหยุดลง แต่ค่าผลรวมที่สะสมไว้ในอดีต (Integral sum) จะยังคงค้างอยู่ในระบบ เพื่อทำหน้าที่เป็น “แรงส่งพื้นฐาน (Bias หรือ Reset)” คอยต้านแรงต้านทานของระบบเอาไว้
ด้วยเหตุนี้ ตัวควบคุมที่มีการทำงานแบบ Integral จะสามารถรับประกันได้เสมอว่า Steady-state error จะต้องกลายเป็นศูนย์ (Zero steady-state error) ไม่ว่าสัญญาณรบกวนภายนอกจะเปลี่ยนแปลงไปอย่างไรก็ตาม
4. 🧮 ร่ายมนต์สมการและโค้ดควบคุม (The Math & Implementation)
ในโดเมนของเวลา (Time Domain) สมการคณิตศาสตร์ของการควบคุมแบบ Proportional-Integral (PI) สามารถเขียนได้ดังนี้: $$ u(t) = u_0 + K_p e(t) + \frac{K_p}{T_i} \int_{0}^{t} e(\tau) d\tau $$ โดยที่:
- $u(t)$ คือ สัญญาณสั่งงานที่ส่งให้ Actuator
- $K_p$ คือ อัตราขยายสัดส่วน (Proportional Gain)
- $T_i$ คือ เวลาปริพันธ์ (Integral Time หรือ Reset Time) ซึ่งบอกถึงเวลาที่ I-term จะทำงานซ้ำรอย P-term ยิ่งค่า $T_i$ น้อย ระบบจะยิ่งกำจัด Error ได้เร็ว
- $e(t)$ คือ ค่าความผิดพลาด ณ เวลา $t$
เมื่อเราต้องนำสมการนี้ไปแปลงเป็นโค้ดภาษา C ลงบน Microcontroller (เช่น STM32) เราไม่สามารถทำอินทิเกรตแบบต่อเนื่องได้ เราจึงต้องใช้ระเบียบวิธีทางตัวเลข (Numerical Method) เช่น Euler Backward method ซึ่งเป็นการประมาณค่าพื้นที่ใต้กราฟด้วยสี่เหลี่ยมผืนผ้า ดังสมการเชิงวิยุต (Discrete-time): $$ u_i(t_k) = u_i(t_{k-1}) + \frac{K_p T_s}{T_i} e(t_k) $$ (โดยที่ $T_s$ คือ Sample time หรือรอบเวลาการทำงานของลูป)
ตัวอย่างการเขียนโค้ด (C/C++):
// ตัวแปรในระบบ (Global Variables)
float Kp = 1.40; // อัตราขยายสัดส่วน (Proportional Gain)
float Ti = 15.0; // เวลาปริพันธ์ (Integral Time)
float Ts = 0.01; // Sampling Time (เช่น 10ms)
float ui_prev = 0.0; // ค่าผลรวม Integral ในรอบที่แล้ว
float PI_Controller_Update(float setpoint, float measured_value) {
// 1. คำนวณค่าความผิดพลาดปัจจุบัน
float error = setpoint - measured_value;
// 2. คำนวณ P-Term
float up = Kp * error;
// 3. คำนวณ I-Term โดยใช้วิธี Euler Backward
// สะสมพื้นที่ใต้กราฟ: ค่าเดิม + (พื้นที่สี่เหลี่ยมของรอบนี้)
float ui = ui_prev + ((Kp * Ts) / Ti) * error;
// 4. รวมสัญญาณสั่งงาน
float output = up + ui;
// อัปเดตค่า Integral สำหรับใช้ในรอบต่อไป
ui_prev = ui;
return output;
}5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
ในทางปฏิบัติ วิศวกรแทบจะไม่เคยใช้ I-Control เดี่ยวๆ เลย เพราะตัวควบคุมแบบ I ล้วนๆ (Pure I controller) จะมีการตอบสนองที่ช้ามาก และมักจะทำให้ระบบพุ่งทะลุเป้าหมาย (Overshoot) เสมอ เราจึงต้องใช้ร่วมกับ P กลายเป็น PI Controller
ระวังปีศาจร้ายที่ชื่อว่า “Integral Windup”! ลองนึกภาพตามนะครับ ถ้ารถของคุณพยายามจะเร่งความเร็ว แต่ล้อดันติดหล่ม (Actuator Saturation) ตัวควบคุม I จะไม่รู้ว่ารถติดหล่ม มันจะเห็นแค่ว่า Error ยังคงอยู่ จึงเดินหน้า “สะสมค่าผลรวมความผิดพลาด” ให้ใหญ่ขึ้นเรื่อยๆ จนมหาศาล
เมื่อรถหลุดจากหล่มได้ ค่าผลรวม (Integral sum) ที่สะสมไว้ใหญ่ทะลุฟ้า จะสั่งให้คันเร่งค้างมิดด้ามต่อไป แม้ว่าความเร็วจะถึงเป้าหมายแล้วก็ตาม ส่งผลให้ความเร็วพุ่งปรี๊ดเลยขีดจำกัด (Overshoot รุนแรง) จนกว่าระบบจะใช้เวลาอีกพักใหญ่ในการ “สะสม Error แดนลบ” เพื่อหักล้างค่าบวกเดิมทิ้ง ปรากฏการณ์นี้เรียกว่า Integrator Windup
วิธีป้องกัน (Anti-Windup):
วิศวกรระบบควบคุมแก้ไขปัญหานี้โดยการเขียนลอจิกหยุดการทำงานของตัวอินทิเกรต (Halt integration) หรือหยุดบวกค่า ui เพิ่ม ทันทีที่พบว่าสัญญาณสั่งงาน output ชนขีดจำกัดสูงสุดของฮาร์ดแวร์แล้ว (เช่น Duty Cycle ของ PWM ชน 100%) วิธีนี้จะช่วยให้หุ่นยนต์ของคุณไม่เกิดอาการคลุ้มคลั่งเมื่อเจอข้อจำกัดทางกายภาพครับ
6. 🏁 บทสรุป (To be continued…)
การเพิ่ม Integral Control (I) เข้ามาในระบบ คือการมอบ “ความทรงจำ” ให้กับสมองกล ทำให้มันรู้จักเรียนรู้จากความผิดพลาดที่สะสมมาตั้งแต่อดีต เพื่อใช้เป็นแรงผลักดันสุดท้ายในการกำจัด Steady-state error ให้หายไปอย่างถาวร ทำให้ PI Controller กลายเป็นอัลกอริทึมที่ได้รับความนิยมมากที่สุดในอุตสาหกรรม (มากกว่า 95% ของลูปควบคุมทั้งหมด)
อย่างไรก็ตาม แม้ว่าการตอบสนองของระบบจะแม่นยำขึ้น แต่มันก็ยังขาด “วิสัยทัศน์ในการมองอนาคต” ทำให้ระบบ PI มักจะมีอาการแกว่งหรือ Overshoot เล็กน้อย ในตอนต่อไป เราจะพาไปพบกับจิ๊กซอว์ชิ้นสุดท้าย นั่นคือ Derivative Control (D) ตาทิพย์แห่งการทำนายอนาคต ที่จะมาช่วยให้หุ่นยนต์ของเราเบรกได้อย่างนุ่มนวลดุจแพรไหม รอติดตามนะครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบควบคุม (Control Systems), หุ่นยนต์อัตโนมัติ (Robotics) หรือพัฒนาระบบ Automation ขั้นสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p