ตอนที่ 4: ประวัติศาสตร์การควบคุม: จากเครื่องจักรไอน้ำยุคแรกถึงปัจจุบัน
1. 🎯 ตอนที่ 4: ประวัติศาสตร์การควบคุม: จากเครื่องจักรไอน้ำยุคแรกถึงปัจจุบัน
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับผู้อ่านทุกท่าน! กลับมาพบกันอีกครั้งในซีรีส์ เจาะลึกวิศวกรรมระบบควบคุม (Control Systems) จาก 101 ถึง Advance
ถ้าพูดถึงเทคโนโลยี AI หรือหุ่นยนต์อัตโนมัติในปัจจุบัน หลายคนอาจคิดว่าศาสตร์แห่งการควบคุมเครื่องจักรเพิ่งเกิดขึ้นในยุคคอมพิวเตอร์นี้เอง แต่ความจริงแล้ว “จิตวิญญาณแห่ง Automation” มีอายุยาวนานกว่าที่คุณคิดมากครับ! วันนี้พี่จะขอสวมหมวกนักเล่านิทาน พาย้อนเวลาไทม์แมชชีนกลับไปดูวิวัฒนาการของ Control Theory ตั้งแต่ยุคที่ชาวกรีกโบราณพยายามควบคุมระดับน้ำ ไปจนถึงยุคปฏิวัติอุตสาหกรรมที่ James Watt ทำให้โลกสั่นสะเทือน และการถือกำเนิดของสมการ PID บนเรือรบขนาดมหึมา ที่ยังคงเป็นรากฐานของหุ่นยนต์อุตสาหกรรมจนถึงทุกวันนี้ครับ
3. 🧠 แก่นวิชา (Core Concepts)
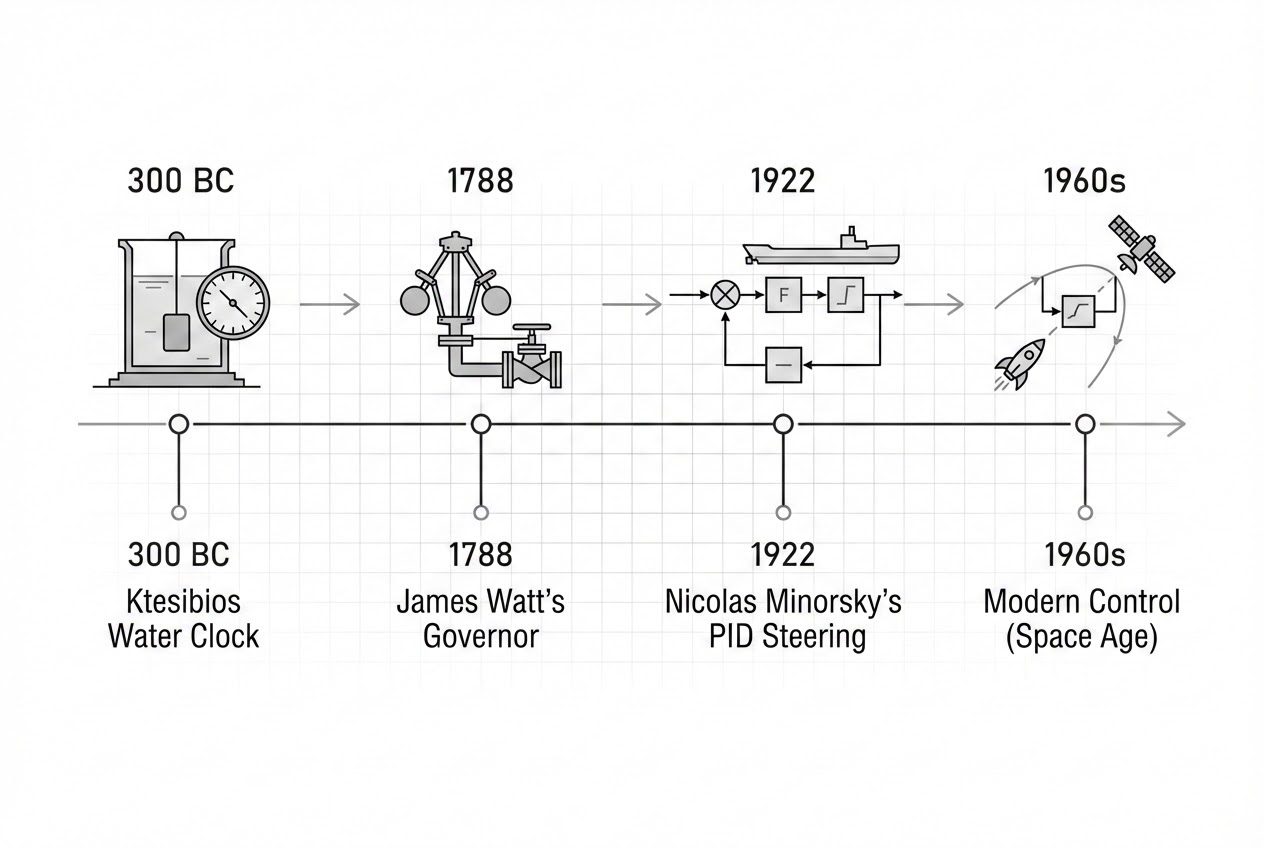
ประวัติศาสตร์ของระบบควบคุมสามารถแบ่งออกเป็นยุคสำคัญๆ ที่พลิกโฉมหน้าวงการวิศวกรรมได้ดังนี้ครับ:
- ยุคเริ่มต้น (Ancient Origins - 300 B.C.): เชื่อไหมครับว่าระบบป้อนกลับ (Feedback Control) ระบบแรกของโลกถูกคิดค้นโดยชาวกรีกชื่อ Ktesibios เขาได้สร้าง “นาฬิกาน้ำ (Water Clock)” ที่ใช้กลไกลูกลอยควบคุมอัตราการไหลของน้ำให้คงที่ ซึ่งหลักการนี้ยังคงใช้อยู่ในชักโครกตามบ้านเราจนถึงทุกวันนี้!
- ยุคปฏิวัติอุตสาหกรรม (Industrial Revolution - 1788): จุดเปลี่ยนสำคัญของโลกเกิดขึ้นเมื่อ James Watt ประดิษฐ์สิ่งที่เรียกว่า Centrifugal Flyball Governor (ลูกเหวี่ยงหนีศูนย์) เพื่อควบคุมความเร็วของเครื่องจักรไอน้ำ หลักการคือ เมื่อเครื่องจักรหมุนเร็วขึ้น ลูกตุ้มจะกางออกด้วยแรงหนีศูนย์กลาง แล้วไปดึงกลไกเพื่อปิดวาล์วลดปริมาณไอน้ำ ทำให้ความเร็วลดลง และถ้ารถหมุนช้าลง ลูกตุ้มก็หุบเข้าเพื่อเปิดวาล์ว นี่คือระบบควบคุมแบบ Proportional Control ที่ทำงานด้วยกลไกล้วนๆ แบบ 100%
- ยุคแห่งสมการคณิตศาสตร์ (The Birth of Math & Stability - 1868 ถึง 1895): ตอนแรกคนสร้างเครื่องจักรก็สร้างไปโดยใช้สัญชาตญาณ จนกระทั่ง James Clerk Maxwell (คนเดียวกับที่คิดค้นสมการแม่เหล็กไฟฟ้า) ได้เข้ามาวิเคราะห์ระบบของลูกเหวี่ยง Watt ด้วยสมการคณิตศาสตร์ เขาค้นพบว่าทำไมบางครั้งเครื่องจักรถึงเกิดอาการ “ส่ายหรือแกว่งไม่หยุด (Hunting)” ซึ่งนำไปสู่การค้นพบทฤษฎีเสถียรภาพ (Stability Criterion) และต่อมา E.J. Routh และ A. Hurwitz ก็ได้สร้างเครื่องมือทางคณิตศาสตร์เพื่อตรวจสอบเสถียรภาพของระบบ (Routh-Hurwitz criterion)
- ยุคกำเนิดสมการมหาเวทย์ PID (The Birth of PID - 1922): วิศวกรชาวรัสเซีย-อเมริกันชื่อ Nicolas Minorsky ได้รับโจทย์จากกองทัพเรือสหรัฐฯ ให้สร้างระบบควบคุมหางเสือเรือรบอัตโนมัติ (USS New Mexico) เขาไม่ได้นั่งเทียนเขียนสมการ แต่เขาไป “สังเกตพฤติกรรมของคนขับเรือ (Helmsman)” ว่าเวลาเจอคลื่นลม คนขับเรือหักพวงมาลัยอย่างไร Minorsky พบว่าคนขับเรือที่เก่งกาจไม่ได้ดูแค่ “ความผิดพลาดปัจจุบัน” แต่ยังพิจารณาถึง “ความผิดพลาดในอดีตที่สะสมมา” และ “คาดเดาความผิดพลาดในอนาคตจากอัตราการเปลี่ยนแปลง” นี่จึงเป็นที่มาของสมการ Proportional-Integral-Derivative (PID) อย่างเป็นทางการ!
4. 🧮 ร่ายมนต์สมการและโค้ดควบคุม (The Math & Implementation)
มาดูความอัจฉริยะของ Nicolas Minorsky กันครับ เขาแปลงสัญชาตญาณของกะลาสีเรือให้ออกมาเป็นสมการคณิตศาสตร์ (Continuous Time) ได้อย่างงดงาม:
$$ u(t) = K_p e(t) + K_i \int_{0}^{t} e(t) dt + K_d \frac{de(t)}{dt} $$
ในบริบทของการบังคับหางเสือเรือ:
- $K_p e(t)$ (Proportional - มองปัจจุบัน): กะลาสีเห็นว่าเรือเบี่ยงออกจากทิศทางเป้าหมาย (Error) ยิ่งเบี่ยงมาก ก็ยิ่งหมุนพวงมาลัยมาก
- $K_i \int e(t) dt$ (Integral - มองอดีต): ถ้าลมพัดมาจากทิศทางเดิมซ้ำๆ (Steady-state disturbance) เรือจะเอียงไปด้านใดด้านหนึ่งตลอด กะลาสีจะจำไว้และหักพวงมาลัยสู้ลมต้านค้างเอาไว้ เพื่อชดเชยค่า Error สะสมนี้
- $K_d \frac{de(t)}{dt}$ (Derivative - มองอนาคต): กะลาสีที่เก่งจะรับรู้ได้ถึง “ความเร็วในการเบี่ยงเบน” (Rate of change) ถ้าเรือกำลังเหวี่ยงกลับมาหาเป้าหมายอย่างรวดเร็ว กะลาสีจะ “แตะเบรก” หรือหักพวงมาลัยคืนล่วงหน้า (Anticipation) เพื่อป้องกันไม่ให้เรือพุ่งเลยเป้า (Overshoot)
Minorsky ใช้สมการนี้ออกแบบระบบควบคุมบังคับเลี้ยวจนทำให้เรือรบมีความคลาดเคลื่อนเพียง $\pm 1/6$ องศา ซึ่งแม่นยำกว่ามนุษย์ขับเองเสียอีก!
5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
หลังจากยุคของ Minorsky โลกก็เข้าสู่ยุคสงครามโลกครั้งที่ 2 ซึ่งเป็นยุคตื่นทองของ Classical Control (เช่น Bode Plot, Root Locus) ระบบ PID ในตอนนั้นถูกสร้างด้วยอุปกรณ์เชิงกลและวงจรลม (Pneumatic Controllers) ซึ่งทนทานต่อสภาพแวดล้อมในโรงงานอุตสาหกรรมมาก
ต่อมาในปี 1942 มีวิศวกรสองคนชื่อ Ziegler และ Nichols ได้ตั้งกฎที่เรียกว่า “Ziegler-Nichols Tuning Rules” ซึ่งเป็นสูตรสำเร็จในการหาค่า $K_p, K_i, K_d$ โดยไม่ต้องใช้โมเดลทางคณิตศาสตร์ที่ซับซ้อน ทำให้ผู้ปฏิบัติงานหน้างานสามารถจูนเครื่องจักรได้ง่ายขึ้น ซึ่งยังคงใช้มาจนถึงทุกวันนี้
การมาถึงของ Modern Control: พอเข้าสู่ช่วงปี 1960 ซึ่งเป็นยุคสำรวจอวกาศ (Space Age) และการส่งดาวเทียม Sputnik มนุษย์พบว่า Classical Control หรือ PID เอาไม่อยู่เมื่อต้องควบคุมยานอวกาศที่มีหลายอินพุต-หลายเอาต์พุต (MIMO) จึงเกิดทฤษฎี Modern Control Theory ขึ้นมา โดยใช้ State-Space Approach และสมการของ R.E. Kalman (ผู้คิดค้น Kalman Filter) ซึ่งเปลี่ยนจากยุคของฟันเฟืองและวงจรลม มาเป็นยุคของ Digital Computers อย่างเต็มตัวครับ
6. 🏁 บทสรุป (To be continued…)
จากนาฬิกาน้ำของกรีก สู่ลูกเหวี่ยงของ James Watt และระบบขับเรือของ Minorsky ประวัติศาสตร์ได้พิสูจน์แล้วว่า มนุษย์เรามีความพยายามที่จะเอาชนะข้อจำกัดของธรรมชาติและขจัดความผิดพลาดอยู่เสมอ แม้ว่าสมการ PID จะถือกำเนิดขึ้นมาเกือบร้อยปีแล้ว แต่มันยังคงเป็น “ราชาแห่งวงการอุตสาหกรรม” ที่ถูกฝังอยู่ทั้งในชิปไมโครคอนโทรลเลอร์ (MCU) เล็กๆ ไปจนถึงระบบ DCS ขนาดยักษ์ในโรงงานปิโตรเคมีครับ
ในตอนต่อไป เราจะมาเจาะลึกวิธีการจูนตัวควบคุม PID (Controller Tuning) โดยใช้คัมภีร์ลับอย่าง Ziegler-Nichols และการวิเคราะห์ผลตอบสนองกันแบบ Step-by-Step รอติดตามกันนะครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบควบคุม (Control Systems), หุ่นยนต์อัตโนมัติ (Robotics) หรือพัฒนาระบบ Automation ขั้นสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p