ตอนที่ 5: Plant, Sensor, Actuator และ Controller: 4 ทหารเสือระบบควบคุม
1. 🎯 ตอนที่ 5: Plant, Sensor, Actuator และ Controller: 4 ทหารเสือระบบควบคุม
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับน้องๆ และผู้อ่านทุกท่าน! กลับมาพบกันอีกครั้งในซีรีส์ เจาะลึกวิศวกรรมระบบควบคุม (Control Systems) จาก 101 ถึง Advance สไตล์วิศวกรรุ่นพี่ติวรุ่นน้องครับ
ในตอนที่ผ่านๆ มา พี่ได้เล่าถึงความสำคัญของการป้อนกลับ (Feedback) ไปแล้ว แต่ถ้าระบบควบคุม (Closed-loop Control System) เปรียบเสมือน “ร่างกายมนุษย์” ที่กำลังขับรถยนต์ มันจะทำงานไม่ได้เลยถ้าขาดอวัยวะสำคัญไป ลองจินตนาการดูนะครับว่า ถ้าเราตาบอด (ไม่มี Sensor) เราจะมองเห็นเส้นทางไหม? หรือถ้าเราไม่มีกล้ามเนื้อแขนขา (ไม่มี Actuator) สมองของเราจะสั่งหมุนพวงมาลัยได้อย่างไร?
ในทางวิศวกรรมควบคุม โครงสร้างพื้นฐานของระบบจะถูกขับเคลื่อนด้วยองค์ประกอบหลัก 4 ส่วนที่ทำงานสอดประสานกันอย่างแยกไม่ออก พี่ขอเรียกพวกมันว่า “4 ทหารเสือแห่งระบบควบคุม” ซึ่งประกอบไปด้วย Plant, Controller, Actuator และ Sensor วันนี้เราจะมาผ่ากระบวนการ (Block Diagram) ดูกันว่าแต่ละส่วนทำหน้าที่อะไร และทำงานร่วมกันอย่างไรให้เครื่องจักรของเรามีชีวิตขึ้นมาได้ครับ!
3. 🧠 แก่นวิชา (Core Concepts)
ในโลกของวิศวกรรมระบบควบคุม (Control Systems Engineering) ระบบวงจรปิด (Closed-loop System) ทุกระบบ ไม่ว่าจะเป็นลิฟต์โดยสาร หรือระบบขับเคลื่อนหุ่นยนต์ ล้วนถูกสร้างขึ้นจากบล็อกพื้นฐานที่มีหน้าที่เฉพาะตัว ดังนี้ครับ:
1. Plant (กระบวนการหรือเป้าหมายที่ถูกควบคุม)
- มันคืออะไร: Plant หรือ Process คือ “สิ่งที่เราต้องการจะควบคุมมัน” มันอาจจะเป็นส่วนทางกายภาพใดๆ เช่น เครื่องปฏิกรณ์เคมี, ชิ้นส่วนทางกล, โดรน, แขนกล, หรือเตาอบความร้อน
- หน้าที่: รับพลังงานขับเคลื่อนเข้ามา แล้วสร้างผลลัพธ์ (Output) หรือการเปลี่ยนแปลงตามกฎทางฟิสิกส์ (Physical Dynamics) ของตัวมันเอง
2. Controller (สมองกลผู้สั่งการ)
- มันคืออะไร: Controller คือ “สมอง” ของระบบ ประกอบด้วยอัลกอริทึมหรือกฎการควบคุม (Control laws) ในปัจจุบันมักจะเป็น Microcontroller, PLC, หรือ Digital Computer
- หน้าที่: ตรวจจับสัญญาณความผิดพลาด (Actuating error signal) ซึ่งเกิดจากการเปรียบเทียบระหว่างค่าเป้าหมาย (Reference input) กับค่าที่วัดได้จริง จากนั้นจะคำนวณเพื่อสั่งงานไปยัง Actuator
3. Actuator (กล้ามเนื้อผู้ลงมือทำ)
- มันคืออะไร: Actuator คือ “อุปกรณ์แปลงพลังงาน” (Power device) ที่มักจะอยู่ติดกับ Plant
- หน้าที่: รับสัญญาณคำสั่งจาก Controller (ซึ่งมักจะเป็นสัญญาณไฟฟ้ากำลังต่ำ) แล้วขยายกำลัง (Amplify) ให้สูงพอที่จะไปขับเคลื่อน Plant ตามที่ต้องการ ตัวอย่างเช่น มอเตอร์ไฟฟ้า, ฮีตเตอร์ทำความร้อน, หรือวาล์วไฮดรอลิก
4. Sensor (ดวงตาผู้สังเกตการณ์)
- มันคืออะไร: Sensor หรือ Output transducer คืออุปกรณ์ที่ใช้วัดค่าสถานะที่แท้จริงของ Plant แล้วแปลงกลับมาเป็นสัญญาณ (เช่น แรงดันไฟฟ้า) ที่ Controller อ่านเข้าใจได้
- หน้าที่: ทำหน้าที่เป็นสายลับส่งข้อมูลกลับไปให้สมอง (Feedback path) อย่างที่ Tim Wescott ผู้เชี่ยวชาญด้าน Embedded Control ได้กล่าวไว้ว่า “หากปราศจาก Actuator สมองก็เป็นง่อย แต่หากปราศจาก Sensor สมองก็ตาบอด (Without an actuator, a controller is crippled. Without a sensor it is blind.)”
4. 🧮 ร่ายมนต์สมการและโค้ดควบคุม (The Math & Implementation)
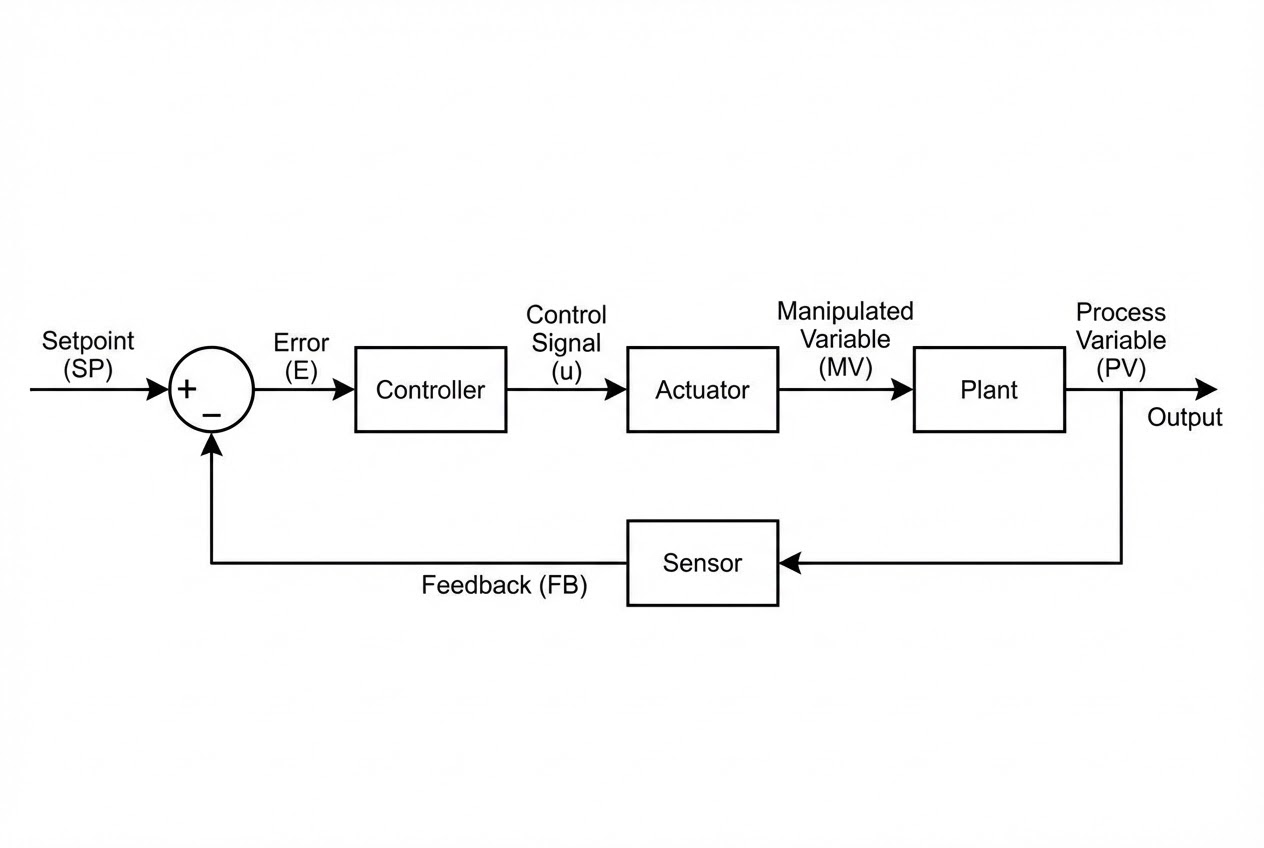
เมื่อนำ 4 ทหารเสือมาวาดเป็นบล็อกไดอะแกรม (Block Diagram) เราจะสามารถอธิบายพฤติกรรมของมันได้ด้วยคณิตศาสตร์ของ ฟังก์ชันถ่ายโอน (Transfer Function) ในโดเมน $s$ (Laplace Transform) ครับ
สมมติให้:
- $G_c(s)$ คือ Transfer Function ของ Controller
- $G_a(s)$ คือ Transfer Function ของ Actuator (บางครั้งถูกรวมไว้ใน Plant)
- $G_p(s)$ คือ Transfer Function ของ Plant
- $H(s)$ คือ Transfer Function ของ Sensor (Feedback path)
เส้นทางขาไป (Forward Path) คือการนำ สมอง $\rightarrow$ กล้ามเนื้อ $\rightarrow$ ร่างกาย มาต่ออนุกรม (Cascade) กัน: $$ G(s) = G_c(s) \times G_a(s) \times G_p(s) $$
และสมการของ Closed-loop Transfer Function (Output ต่อ Input) เมื่อมี Sensor วัดผลกลับมาลบออกจากคำสั่ง จะได้เป็นสมการสุดคลาสสิก: $$ \frac{C(s)}{R(s)} = \frac{G(s)}{1 + G(s)H(s)} $$ (สมการนี้แหละครับที่เป็นหัวใจในการวิเคราะห์เสถียรภาพหรือ Stability ของระบบ)
The C Code Implementation (วิธีเขียนโค้ดลง Microcontroller): ในฝั่งของ Software House หรือ Embedded Engineer เราจะแปลง 4 สหายนี้ให้อยู่ในลูปสั่งงานแบบ Discrete-time (เช่น ใน Timer Interrupt) หน้าตาแบบนี้ครับ:
// ตัวอย่างโครงสร้างระบบควบคุมบนไมโครคอนโทรลเลอร์
void Control_Loop_ISR(void) {
// 1. [Sensor] - อ่านค่าปัจจุบันของ Plant ผ่าน ADC
// แปลงสัญญาณ Analog/Digital ให้เป็นหน่วยทางฟิสิกส์
float process_variable = ADC_Read_Sensor() * SCALING_FACTOR;
// 2. คำนวณความผิดพลาด (Error) = เป้าหมาย (Setpoint) - ค่าที่วัดได้
float error = setpoint - process_variable;
// 3. [Controller] - สมองคำนวณสัญญาณควบคุม (Control law)
// สัญญาณที่ได้ยังเป็นแค่ "ตัวเลขทางคณิตศาสตร์"
float control_signal = PID_Compute(error);
// 4. [Actuator] - ส่งคำสั่งไปกระตุ้นกล้ามเนื้อ ผ่าน DAC หรือ PWM
// เช่น สั่ง PWM ไปยัง Motor Driver เพื่อจ่ายกระแสจริงให้ Plant
Actuator_Set_PWM(control_signal);
}5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
ในเชิงทฤษฎี ทุกอย่างดูง่ายดายเหมือนเอาบล็อกมาคูณกัน แต่เวลาเราทำงานหน้างานจริง มี “จุดตาย” ที่วิศวกรมือใหม่มักจะตกม้าตายครับ:
- Actuator Saturation (ขีดจำกัดของกล้ามเนื้อ): สมการคณิตศาสตร์ $G_c(s)$ ของ Controller อาจจะคำนวณสั่งงานให้ Actuator จ่ายพลังงานออกไปเป็นอนันต์ได้ แต่ในโลกความเป็นจริง Actuator ทุกตัวมีขีดจำกัดทางกายภาพ (Physical limits) เช่น มอเตอร์ไดรเวอร์จ่ายกระแสได้สูงสุดแค่ 10A หรือ PWM ตันที่ 100% หาก Controller สั่งงานเกินกว่าที่ Actuator ทำได้ ระบบจะเกิดปรากฏการณ์ที่เรียกว่า “Saturation” (การอิ่มตัว) ซึ่งจะทำให้เกิดปัญหา Integral Windup (ค่า Error สะสมจนล้น) ทำให้ระบบเบรกไม่อยู่และสูญเสียการควบคุมในที่สุดครับ
- Sensor Noise (ความหลอนของดวงตา): เรามักคิดว่า Sensor จะวัดค่าได้เป๊ะๆ เหมือนสมการอุดมคติ แต่ความเป็นจริง Sensor ทุกตัวมี Noise (สัญญาณรบกวน) ปะปนมาด้วย หากเราป้อนค่าที่มี Noise เข้าไปใน Controller ตรงๆ (โดยเฉพาะเข้าเทอม Derivative ของ PID) มันจะขยายสัญญาณรบกวนนั้น ทำให้ Actuator (เช่น มอเตอร์) สั่นกระตุกอย่างรุนแรงและเกิดความร้อนสูง วิธีแก้ระดับโปรคือต้องใส่ Low-pass Filter คั่นในสาย Feedback เสมอครับ
6. 🏁 บทสรุป (To be continued…)
จะเห็นได้ว่า ระบบควบคุมที่สมบูรณ์แบบ ไม่สามารถพึ่งพาความเก่งกาจของอัลกอริทึม (Controller) ได้เพียงอย่างเดียว หาก Plant ถูกออกแบบมาทางกลไกไม่ดี Actuator อ่อนแรงเกินไป หรือ Sensor ห่วยและเต็มไปด้วย Noise ต่อให้คุณเขียนโค้ด PID ได้เทพแค่ไหน ระบบก็ไม่มีทางทำงานได้นิ่งและเสถียรครับ 4 ทหารเสือนี้ต้องถูกออกแบบให้สอดรับกันเสมอ
ในตอนต่อไป เราจะมาเจาะลึกวิธีการควบคุมพื้นฐานที่สุดอย่าง On-Off Control ว่ามันทำงานอย่างไร และทำไมวิศวกรอย่างเราถึงต้องปวดหัวกับมันจนต้องดิ้นรนไปหา PID Controller รอติดตามกันได้เลยครับ!
ต้องการที่ปรึกษาด้านการออกแบบระบบควบคุม (Control Systems), หุ่นยนต์อัตโนมัติ (Robotics) หรือพัฒนาระบบ Automation ขั้นสูงให้กับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p