ตอนที่ 1: ROS (Robot Operating System) คืออะไร ทำไมหุ่นยนต์ยุคใหม่ถึงขาดมันไม่ได้
1. 🎯 ตอนที่ 1: ปฐมบท ROS 2 ทำไมหุ่นยนต์ยุคใหม่ถึงขาดมันไม่ได้
สวัสดีครับน้องๆ ว่าที่วิศวกรหุ่นยนต์ทุกคน! ยินดีต้อนรับเข้าสู่โลกของการพัฒนาซอฟต์แวร์หุ่นยนต์ สมัยก่อนเวลาเราจะสร้างหุ่นยนต์สักตัว เราต้องเริ่มเขียนโค้ดกันตั้งแต่ศูนย์ (From scratch) ตั้งแต่การเขียนไดรเวอร์คุยกับมอเตอร์ อ่านค่าเซ็นเซอร์ คำนวณสมการ Kinematics ไปจนถึงระบบนำทาง ซึ่งทำให้เราเสียเวลาไปกับการ “สร้างล้อขึ้นมาใหม่” (Reinventing the wheel) ซ้ำแล้วซ้ำเล่า วันนี้พี่จะพาไปรู้จักกับพระเอกของเราที่จะมาทลายกำแพงเหล่านั้น นั่นก็คือ ROS (Robot Operating System) ครับ
2. 📖 เปิดฉาก (The Hook)
ลองจินตนาการดูว่าน้องได้รับโปรเจกต์ให้สร้าง “หุ่นยนต์เสิร์ฟอาหารอัตโนมัติ” ถ้าน้องไม่ใช้ตัวช่วยอะไรเลย สิ่งที่น้องต้องทำคือ: เขียนโค้ดรับภาพจากกล้อง, เขียนโค้ดอ่านค่า LIDAR, สร้างระบบ Mapping เพื่อสร้างแผนที่, เขียนอัลกอริทึมหลบหลีกสิ่งกีดขวาง และเขียนระบบควบคุมมอเตอร์ล้อ… ฟังดูปวดหัวไหมครับ? แล้วถ้ามอเตอร์พัง เปลี่ยนรุ่นใหม่ น้องก็ต้องมารื้อโค้ดทั้งหมดแก้อีกรอบ!
ปัญหาสุดคลาสสิกของคนทำหุ่นยนต์คือ การที่เราต้องเอาซอฟต์แวร์ ฮาร์ดแวร์ และอัลกอริทึมที่มาจากคนละทิศคนละทางมามัดรวมกัน นี่แหละครับคือเหตุผลที่วิศวกรทั่วโลกหันมาพึ่งพา ROS เพื่อให้เราโฟกัสกับการพัฒนาลอจิกเจ๋งๆ ของหุ่นยนต์ แทนที่จะต้องมานั่งเขียนโค้ดเชื่อมต่อฮาร์ดแวร์พื้นฐานใหม่ทุกครั้ง
3. 🧠 แก่นวิชา (Core Concepts)
ก่อนอื่นต้องเคลียร์กันก่อนว่า ถึงชื่อมันจะบอกว่าเป็น “Operating System” แต่ ROS ไม่ใช่ระบบปฏิบัติการ (OS) จริงๆ แบบ Windows หรือ Linux นะครับ แต่มันคือ Meta-Operating System หรือ Middleware ที่ทำงานครอบทับบน OS อีกที (โดยหลักๆ คือรันบน Linux อย่าง Ubuntu)
ROS ถือกำเนิดขึ้นราวๆ ปี 2007 จากห้องแล็บ Stanford Artificial Intelligence Lab (SAIL) ภายใต้โปรเจกต์ STAIR ก่อนที่จะถูกผลักดันอย่างจริงจังโดยศูนย์วิจัย Willow Garage และปัจจุบันดูแลโดย Open Source Robotics Foundation (OSRF) หรือ Open Robotics
เพื่อให้เห็นภาพง่ายๆ พี่ขอแบ่งส่วนประกอบของ ROS ออกเป็น “สมการ 4 เสาหลัก” ดังนี้ครับ:
- Plumbing (ระบบท่อส่งข้อมูล): กลไกการสื่อสาร (Interprocess Communications) ที่ช่วยให้โปรแกรมย่อยๆ (Node) สามารถส่งข้อมูลคุยกันได้ ผ่านระบบ Publisher/Subscriber, Services และ Actions
- Tools (เครื่องมือเทพๆ): ROS มาพร้อมเครื่องมือที่ช่วยชีวิตเราได้เยอะมาก เช่น RViz สำหรับดูภาพ 3D ของหุ่นและเซ็นเซอร์, Gazebo สำหรับรันหุ่นยนต์จำลอง (Simulation) โดยไม่ต้องใช้ของจริง และ rqt สำหรับการ Debug
- Capabilities (ความสามารถพร้อมใช้): มี Package เจ๋งๆ ให้โหลดมาใช้ฟรี เช่น ระบบนำทางอัตโนมัติ (Navigation Stack) หรือระบบควบคุมแขนกล (MoveIt!)
- Ecosystem (ระบบนิเวศ): สังคมนักพัฒนาหุ่นยนต์ทั่วโลกที่คอยแชร์โค้ด (Packages) ถาม-ตอบปัญหาผ่าน ROS Answers ทำให้เราไม่สู้เดี่ยวดาย
4. 💻 ร่ายมนต์โค้ดและคำสั่ง (Show me the Code)
เพื่อให้เห็นภาพว่าการทำงานแบบ “Node” ของ ROS เป็นยังไง ลองดูคำสั่ง Terminal พื้นฐานเวลาเราต้องการตรวจสอบระบบของหุ่นยนต์กันครับ:
# ดูรายชื่อโปรแกรมย่อย (Node) ทั้งหมดที่กำลังทำงานอยู่ในหุ่นยนต์
ros2 node list
# ดูช่องทางการสื่อสาร (Topic) ที่ Node กำลังใช้ส่งข้อมูลหากัน
# เปรียบเหมือนการหาคลื่นสถานีวิทยุที่กำลังกระจายเสียงอยู่
ros2 topic list
# แอบดูข้อมูลที่วิ่งอยู่ใน Topic นั้นๆ แบบ Real-time (เช่น ข้อมูลระยะห่างจากเซ็นเซอร์ LIDAR)
ros2 topic echo /scan5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
ทำไมบริษัทหุ่นยนต์ชั้นนำ สถาบันวิจัย และมหาวิทยาลัยทั่วโลกถึงเลือกใช้ ROS? นี่คือข้อได้เปรียบที่น้องๆ ควรรู้ไว้ครับ:
- ความเป็นโมดูลาร์ (Modularity): ROS แบ่งโปรแกรมเป็นส่วนย่อยๆ ที่เรียกว่า Node ทำงานแยกกันอย่างอิสระ ถ้า Node ประมวลผลภาพกล้องพัง Node ควบคุมล้อมอเตอร์ก็ยังทำงานต่อได้ ไม่พาให้หุ่นยนต์แฮงก์ไปทั้งตัว
- โค้ดใช้งานข้ามแพลตฟอร์มและภาษาได้ (Language Independence & Cross-Platform): น้องสามารถให้พี่คนนึงเขียน Node ควบคุมกล้องด้วย C++ (เพื่อความรวดเร็ว) และให้น้องอีกคนเขียน Node ตัดสินใจด้วย Python (เพื่อความง่ายและต่อกับ AI) ทั้งสอง Node สามารถคุยกันผ่านระบบ ROS ได้อย่างไร้รอยต่อ
- ระบบจำลองที่เหมือนจริง (Simulation): เราสามารถสร้างหุ่นยนต์ใน Gazebo ทดสอบโค้ดจนมั่นใจ แล้วค่อยนำโค้ดชุดเดียวกันเป๊ะๆ ไปรันในหุ่นยนต์จริงได้เลย ช่วยประหยัดเวลาและลดความเสียหายของฮาร์ดแวร์
- Hardware Abstraction (ตัดความซับซ้อนของฮาร์ดแวร์): ไม่ว่าน้องจะใช้เซ็นเซอร์ยี่ห้ออะไร ถ้ามันรองรับ ROS น้องแค่ดึงข้อมูลจาก “Topic” มาใช้ได้เลย ไม่ต้องไปปวดหัวนั่งแกะ Data Sheet ของฮาร์ดแวร์แต่ละตัว
6. 🏁 บทสรุป (To be continued…)
สรุปแล้ว ROS ก็คือ “ระบบนิเวศและตัวกลาง” ที่เกิดมาเพื่อปลดแอกวิศวกรหุ่นยนต์จากการต้องเริ่มสร้างทุกอย่างจากศูนย์ ทำให้เราสามารถพัฒนาระบบที่ซับซ้อนได้อย่างรวดเร็ว มีเครื่องมือ Debug ที่ทรงพลัง และมีชุมชนที่คอยสนับสนุนอยู่ตลอดเวลา
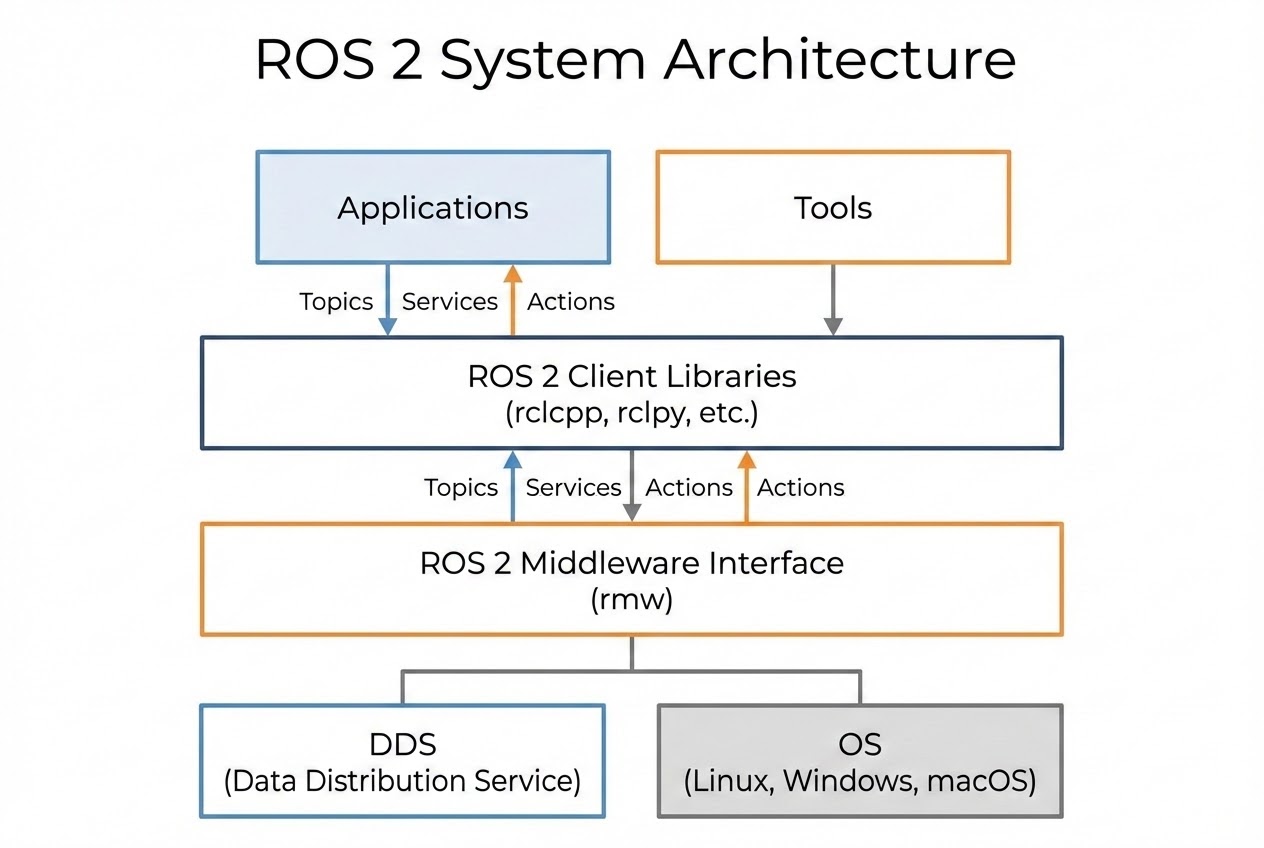
ในยุคของ ROS 2 ได้มีการอัปเกรดระบบสื่อสารให้ทำงานบนมาตรฐาน Data Distribution Service (DDS) เพื่อให้ตอบโจทย์การทำงานแบบ Real-Time และความปลอดภัยระดับอุตสาหกรรมมากยิ่งขึ้น ในตอนต่อไป พี่จะพาน้องๆ ไปเจาะลึกโครงสร้างการสื่อสารหลักของมันกัน เตรียมตัวเปิด Terminal รอไว้ได้เลยครับ!
ต้องการที่ปรึกษาด้านการออกแบบสถาปัตยกรรมหุ่นยนต์ (Robotics) และระบบ Automation ให้กับองค์กรของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและพัฒนาซอฟต์แวร์แบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p