ตอนที่ 21: ROS Controllers (ros_control) ระบบสมองกลสั่งการมอเตอร์
1. 🎯 ตอนที่ 21: ROS Controllers (ros_control) ระบบสมองกลสั่งการมอเตอร์
สวัสดีครับน้องๆ วิศวกรหุ่นยนต์ทุกคน! ในตอนที่ผ่านๆ มา เราได้เรียนรู้วิธีการคำนวณสมการ Kinematics เพื่อแปลงคำสั่งความเร็ว (Twist) ให้เป็นความเร็วของล้อซ้าย-ขวากันไปแล้ว แต่ในโลกของความเป็นจริง การสั่งให้มอเตอร์หมุนด้วยความเร็ว 5 rad/s มันไม่ได้ทำได้ด้วยการสั่งแค่ครั้งเดียวแล้วจบนะครับ!
ลองนึกภาพหุ่นยนต์ของเราวิ่งขึ้นเนินดูสิครับ น้ำหนักและแรงโน้มถ่วงจะดึงให้มอเตอร์หมุนช้าลง ถ้าระบบของเราไม่รู้จัก “การปรับตัว” หุ่นยนต์ก็คงไหลถอยหลังตกเนินไปแล้ว! วันนี้พี่จะพาไปเจาะลึกสถาปัตยกรรมระดับปรมาจารย์ที่ชื่อว่า ros2_control (พัฒนาต่อยอดมาจาก ros_control ในยุค ROS 1) ซึ่งเปรียบเสมือน “ระบบประสาทอัตโนมัติ” ที่คอยคุมวงจร PID ของหุ่นยนต์ให้ทำงานได้อย่างแม่นยำและเสถียรที่สุดครับ!
2. 📖 เปิดฉาก (The Hook)
หน้าที่ของ Controller คือสิ่งที่อยู่ตรงกลางระหว่าง Sensor และ Actuator มันรับข้อมูลเข้ามา ประมวลผลผ่านอัลกอริทึม แล้วส่งคำสั่งไปควบคุมมอเตอร์ให้ขยับ
สมัยก่อน เวลาวิศวกรจะสร้างหุ่นยนต์ขึ้นมาสักตัว พวกเขาต้องเขียนลูปคำนวณวงจร PID (Proportional-Integral-Derivative) แยกกันสำหรับมอเตอร์ทุกตัว ทั้งเขียนโค้ดอ่านค่า Encoder (Sensor) ทั้งเขียนโค้ดสั่งงาน PWM (Actuator) พอต้องเปลี่ยนฮาร์ดแวร์ทีนึง ก็ต้องมารื้อโค้ดเขียนใหม่ทั้งหมด! มันคือการ “Reinvent the wheel” หรือการประดิษฐ์ล้อซ้ำแล้วซ้ำเล่าที่น่าเบื่อมาก
เพื่อแก้ปัญหานี้ ทีมพัฒนา ROS จึงได้สร้างเฟรมเวิร์ก ros2_control ขึ้นมา มันออกแบบมาให้เราแยก “สมการคณิตศาสตร์ (Controllers)” ออกจาก “การคุยกับฮาร์ดแวร์จริง (Hardware Interface)” อย่างเด็ดขาด! ทำให้เราสามารถนำโค้ด PID สุดเทพที่เขียนไว้ ไปใช้ได้กับทั้งหุ่นยนต์ในโลกจำลอง (Gazebo) และหุ่นยนต์ของจริงได้โดยไม่ต้องแก้โค้ดเลยแม้แต่บรรทัดเดียว!
3. 🧠 แก่นวิชา (Core Concepts)
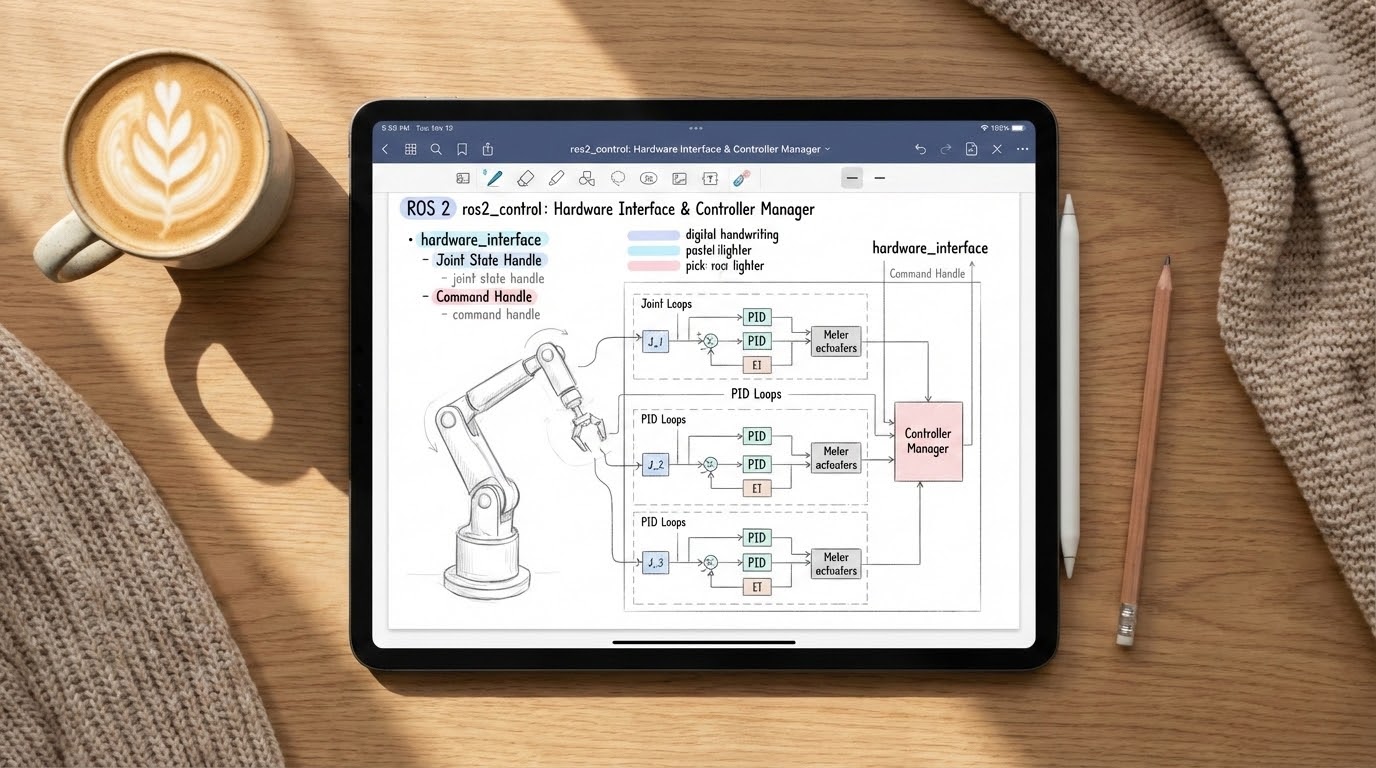
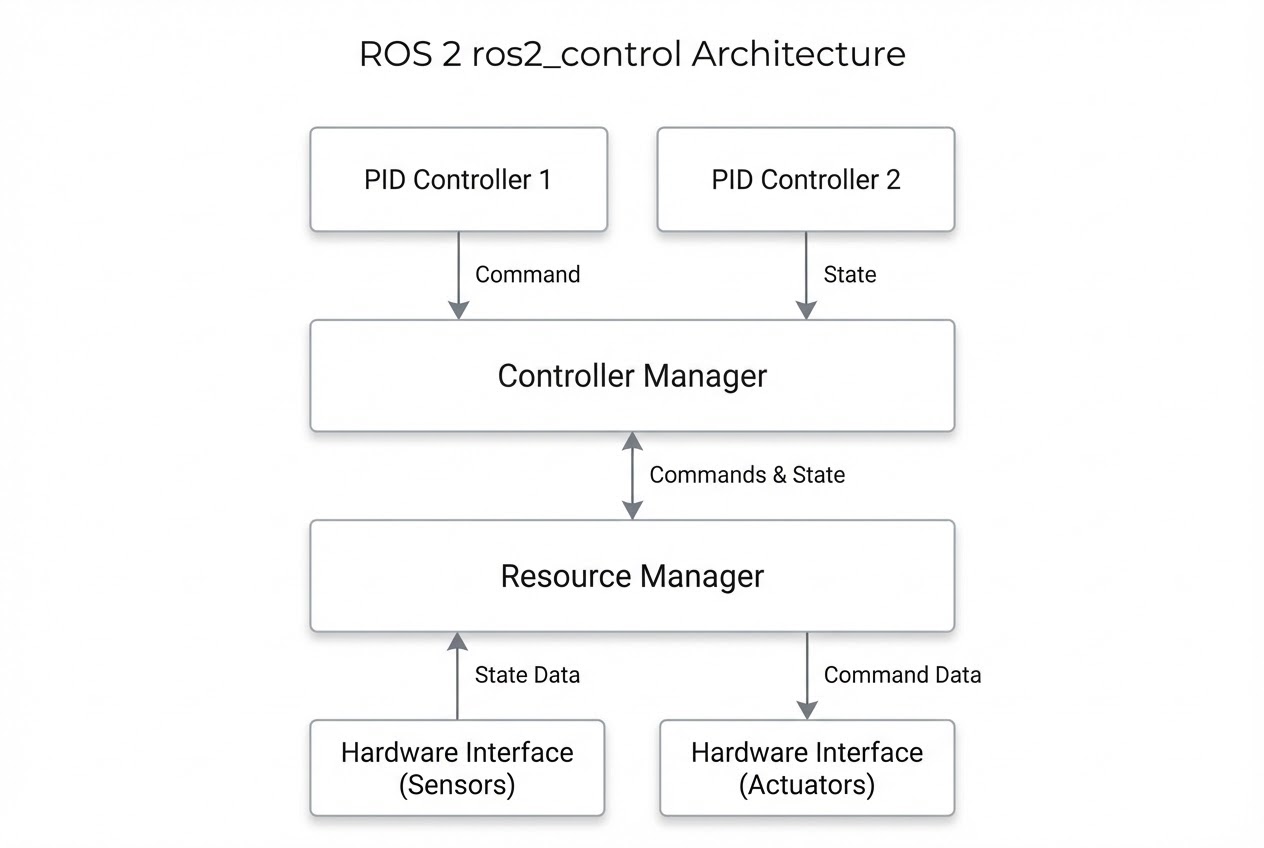
สถาปัตยกรรมของ ros2_control มีความสง่างามและถูกแบ่งออกเป็นส่วนๆ อย่างชัดเจน ดังนี้ครับ:
- Controller Manager (ผู้จัดการใหญ่):
เปรียบเสมือนผู้จัดการโรงงาน มีหน้าที่รับผิดชอบในการโหลด (Load), ตั้งค่า (Configure), และจัดการวงจรชีวิตของ Controllers ต่างๆ รวมถึงควบคุมการทำงานในระดับ Real-time loop โดยจะเรียกฟังก์ชัน
update()ของแต่ละ Controller ที่กำลังทำงานอยู่ (Active) ตามลำดับ - Controllers (วิศวกรผู้คำนวณ): คือปลั๊กอินหรือโมดูลที่รับผิดชอบในการคำนวณตรรกะการควบคุม เช่น การควบคุมตำแหน่ง (Position), ความเร็ว (Velocity), หรือแรงบิด (Effort/Torque) Controller จะนำค่าที่วัดได้จริง (Feedback) มาหักลบกับเป้าหมาย (Setpoint) เพื่อหาค่า Error และส่งต่อให้สมการอย่าง PID คำนวณหาค่าคำสั่ง (Command)
- Resource Manager (ผู้ดูแลคลังทรัพยากร): ทำหน้าที่จัดการทรัพยากรฮาร์ดแวร์อย่างมีประสิทธิภาพ เพื่อให้แน่ใจว่า Controller หลายๆ ตัวสามารถแชร์การเข้าถึง Hardware Interfaces ได้โดยไม่เกิดความขัดแย้ง (Conflicts)
- Hardware Interface (ล่ามแปลภาษา): นี่คือส่วนที่ต้องไปคลุกคลีกับฮาร์ดแวร์ (หรือ Simulator) โดยตรง มันจะเตรียม State Interface (อ่านค่าจาก Sensor เช่น Encoder) และ Command Interface (เขียนค่าลง Actuator เช่น สั่ง Voltage หรือ PWM) เอาไว้ให้ Controller เรียกใช้งาน
4. 💻 ร่ายมนต์โค้ดและคำสั่ง (Show me the Code)
เพื่อให้ระบบ ros2_control ทำงานได้ เราต้องนิยามมันลงไปในพิมพ์เขียว (URDF/Xacro) ของหุ่นยนต์เสียก่อนครับ ลองดูตัวอย่างการเซ็ตอัปกัน:
1. การฝัง ros2_control ลงใน URDF/Xacro:
เราจะใช้แท็ก <ros2_control> เพื่อบอกว่าข้อต่อ (Joint) นี้รองรับการควบคุมแบบไหน
<!-- 1. ประกาศ Plugin สำหรับคุยกับ Simulator (ในที่นี้คือ Ignition Gazebo) -->
<ros2_control name="IgnitionSystem" type="system">
<hardware>
<plugin>ign_ros2_control/IgnitionSystem</plugin>
</hardware>
<!-- 2. กำหนดชนิดของการควบคุมให้กับข้อต่อที่ชื่อ revolute_joint -->
<joint name="revolute_joint">
<!-- Command Interface (สิ่งที่เราสั่งมอเตอร์ได้) -->
<command_interface name="position" />
<command_interface name="velocity" />
<!-- State Interface (สิ่งที่เราอ่านกลับมาจากเซ็นเซอร์ได้) -->
<state_interface name="position"/>
<state_interface name="velocity"/>
<state_interface name="effort"/>
</joint>
</ros2_control>2. การตั้งค่า Controller (YAML Configuration):
ต่อมา เราต้องสร้างไฟล์ controller.yaml เพื่อบอก Controller Manager ว่าเราจะใช้ Controller ตัวไหนบ้าง
controller_manager:
ros__parameters:
update_rate: 100 # ความถี่ของ Real-time loop (Hz)
# ประกาศใช้งาน Joint State Broadcaster (ทำหน้าที่อ่านและพ่นค่า /joint_states)
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
# ประกาศใช้งาน Velocity Controller
velocity_control:
type: forward_command_controller/ForwardCommandController
# กำหนดสเปกของ Velocity Controller
velocity_control:
ros__parameters:
joints:
- revolute_joint
interface_name: velocity # ควบคุมด้วยโหมดความเร็ว3. คำสั่ง Terminal สำหรับจัดการ Controllers:
น้องๆ สามารถใช้คำสั่ง ros2 control เพื่อเช็คและสั่งงาน Controller Manager ได้แบบ Real-time เลยครับ!
# ขอดูรายชื่อ Controller ทั้งหมดที่โหลดอยู่ในระบบตอนนี้
ros2 control list_controllers
# โหลด Controller ใหม่ (แต่ยังไม่เริ่มทำงาน)
ros2 control load_controller velocity_control
# สั่งให้ Controller เริ่มทำงาน (หรือใช้บริการ switch_controller เพื่อสลับโหมดการทำงาน)
ros2 control set_controller_state velocity_control active5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
ในฐานะที่พี่ปรับจูน PID จนมอเตอร์ไหม้มาหลายตัว นี่คือสิ่งที่น้องต้องระวังครับ:
- อย่าสับสนระหว่าง “Load”, “Start” และ “Stop”: วงจรชีวิตของ Controller แบ่งเป็นสเตตัสชัดเจน เมื่อเรา “Load” (หรือ Initialized) Controller เข้ามา มันยังไม่ทำงาน จนกว่าเราจะสั่ง “Start” (Running) และเมื่อเราสั่ง “Stop” มันแค่หยุดการทำงาน (กลับไปสถานะ Initialized) แต่มันยังไม่ได้ถูก “Unload” ออกจากหน่วยความจำนะครับ!
- ศัตรูตัวฉกาจของ Controller คือ “ความหน่วง” (Delays):
ลูปการทำงาน
update()ของ Controller Manager (Real-time loop) จะต้องเสร็จสิ้นภายในเวลาที่กำหนด (เช่น 1ms สำหรับ 1000Hz) ถ้าน้องเขียนโค้ดที่ต้องรอข้อมูลนานๆ (Blocking) หรือใช้ Network ที่มี Delay สูงๆ ระบบ PID จะคำนวณพลาด หุ่นยนต์จะเกิดการสั่น (Oscillate) และไม่เสถียรในที่สุด! - จาก Simulation สู่ฮาร์ดแวร์จริง:
ความเจ๋งของเฟรมเวิร์กนี้คือ ตอนน้องทำ Simulation ใน Gazebo น้องใช้
ign_ros2_control/IgnitionSystemเป็นปลั๊กอินฮาร์ดแวร์ พอหุ่นยนต์ประกอบเสร็จ น้องแค่ไปเขียน C++ Hardware Interface สำหรับไดรเวอร์มอเตอร์ของน้อง แล้วเปลี่ยนแท็ก<plugin>ใน URDF… ปุ๊ง! โค้ด Navigation และ Controller ทั้งหมดของน้องจะทำงานกับหุ่นจริงได้ทันทีแบบไร้รอยต่อครับ!
6. 🏁 บทสรุป (To be continued…)
ros2_control คือระบบสมองกลหลังบ้านที่คอยซัพพอร์ตการเคลื่อนไหวของหุ่นยนต์ มันช่วยคัดกรองความวุ่นวายของการสื่อสารฮาร์ดแวร์ออกจากลอจิกการคำนวณ ทำให้โค้ดของเราเป็นระเบียบ (Modular) จัดการทรัพยากรได้อย่างชาญฉลาด และสามารถสลับโหมดควบคุมระหว่าง Position, Velocity, และ Effort ได้อย่างอิสระ
เมื่อหุ่นยนต์ของเรารู้จักตัวเองผ่าน TF และมีกล้ามเนื้อที่ถูกควบคุมอย่างแม่นยำด้วย ros2_control แล้ว มันก็พร้อมที่จะก้าวเดินออกไปสำรวจโลกกว้างครับ! ในตอนต่อไป พี่จะพาน้องๆ ไปพบกับความท้าทายระดับมหากาพย์ นั่นคือ Navigation Stack (Nav2) ที่จะทำให้หุ่นยนต์สามารถวางแผนเส้นทางหลบหลีกสิ่งกีดขวางได้เองอย่างอัจฉริยะ เตรียมตัวจับพวงมาลัยให้แน่น แล้วพบกันครับ!
ต้องการที่ปรึกษาด้านการออกแบบสถาปัตยกรรมหุ่นยนต์ (Robotics) และระบบ Automation ให้กับองค์กรของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและพัฒนาซอฟต์แวร์แบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p