ตอนที่ 15: Launch Files ศิลปะการเปิดร้อย Nodes ในคลิกเดียว
1. 🎯 ตอนที่ 15: Launch Files ศิลปะการเปิดร้อย Nodes ในคลิกเดียว
สวัสดีครับน้องๆ วิศวกรหุ่นยนต์ทุกคน! เดินทางมาถึงตอนที่ 15 กันแล้ว ตอนนี้น้องๆ คงสามารถเขียน Node ทั้ง Publisher, Subscriber, Service ไปจนถึง Action และสร้าง Custom Message กันได้คล่องมือแล้วใช่ไหมครับ
แต่ในโลกความเป็นจริงของหุ่นยนต์ระดับอุตสาหกรรม หุ่นยนต์หนึ่งตัวไม่ได้มีแค่ 2-3 Nodes นะครับ! ลองนึกถึงหุ่นยนต์ขับเคลื่อนอัตโนมัติ (AMR) ที่มีทั้งโหนดกล้อง, LIDAR, มอเตอร์ล้อซ้าย-ขวา, ระบบ Path Planning, ระบบ Localization… รวมๆ แล้วอาจจะมีมากกว่า 20 Nodes! ถ้าน้องต้องมานั่งเปิด Terminal 20 หน้าต่าง แล้วพิมพ์ ros2 run ทีละบรรทัด พร้อมกับพิมพ์กำหนด Parameter ให้แต่ละตัว… พี่รับรองว่าน้องจะหมดไฟในการทำหุ่นยนต์ไปซะก่อน!
วันนี้พี่จะพาไปรู้จักกับ “เวทมนตร์แห่งการ Automation” ที่วิศวกร ROS ทุกคนต้องใช้ นั่นคือ Launch Files ครับ แค่พิมพ์คำสั่งเดียว หุ่นยนต์ทั้งระบบก็จะลุกขึ้นมามีชีวิตทันที!
2. 📖 เปิดฉาก (The Hook)
สมัยที่พี่ทำโปรเจกต์หุ่นยนต์ส่งของตัวแรก พี่พยายามเขียน Bash Script ยัดคำสั่ง rosrun (ในยุค ROS 1) ลงไปต่อๆ กันยาวเหยียด ผลคือพอมี Node นึงพัง พี่ก็ไม่รู้ว่าตัวไหนพัง แถมการจะส่งค่า Parameter ต่างๆ เข้าไปในแต่ละ Node ก็วุ่นวายจนโค้ดอ่านแทบไม่รู้เรื่อง
ปัญหานี้แก้ไขได้ด้วยสถาปัตยกรรมของ ROS ที่เรียกว่า Launch Files ครับ มันเปรียบเสมือน “ผู้จัดการวงออร์เคสตรา (Orchestration)” ที่คอยสั่งการว่า นักดนตรี (Node) คนไหนต้องเริ่มเล่นตอนไหน ใครต้องใช้โน้ตเพลง (Parameters) อะไร และถ้าต้องการเปลี่ยนคีย์เพลงกะทันหัน (Launch Arguments) ก็สามารถสั่งการจากส่วนกลางได้เลยโดยไม่ต้องไปไล่บอกทีละคน นี่แหละครับคือศิลปะของการจัดการระบบที่ซับซ้อน!
3. 🧠 แก่นวิชา (Core Concepts)
ก่อนที่เราจะไปลุยโค้ด มาทำความเข้าใจวิวัฒนาการและโครงสร้างของมันกันก่อนครับ:
- ยุค ROS 1 (XML ล้วน): ในอดีต Launch file จะถูกเขียนด้วยโครงสร้าง XML (
.launch) ซึ่งอ่านง่าย แต่มีข้อจำกัดตรงที่มันขาดความยืดหยุ่นในการเขียนลอจิก เช่น การทำเงื่อนไข If-Else หรือ Loop - ยุค ROS 2 (พลังแห่ง Python): แม้ ROS 2 จะยังรองรับ XML และ YAML อยู่ แต่ภาษาสายหลักที่ถูกดันขึ้นมาเป็นพระเอกคือ Python (
.launch.py) ครับ! การใช้ Python ทำให้เราสามารถเขียนลอจิกควบคุมการเปิดปิด Node ได้อย่างอิสระ ตรวจสอบตัวแปรระบบ (Environment Variables) หรือแม้แต่การเช็คสเปคฮาร์ดแวร์ก่อนรัน Node ก็ทำได้หมด!
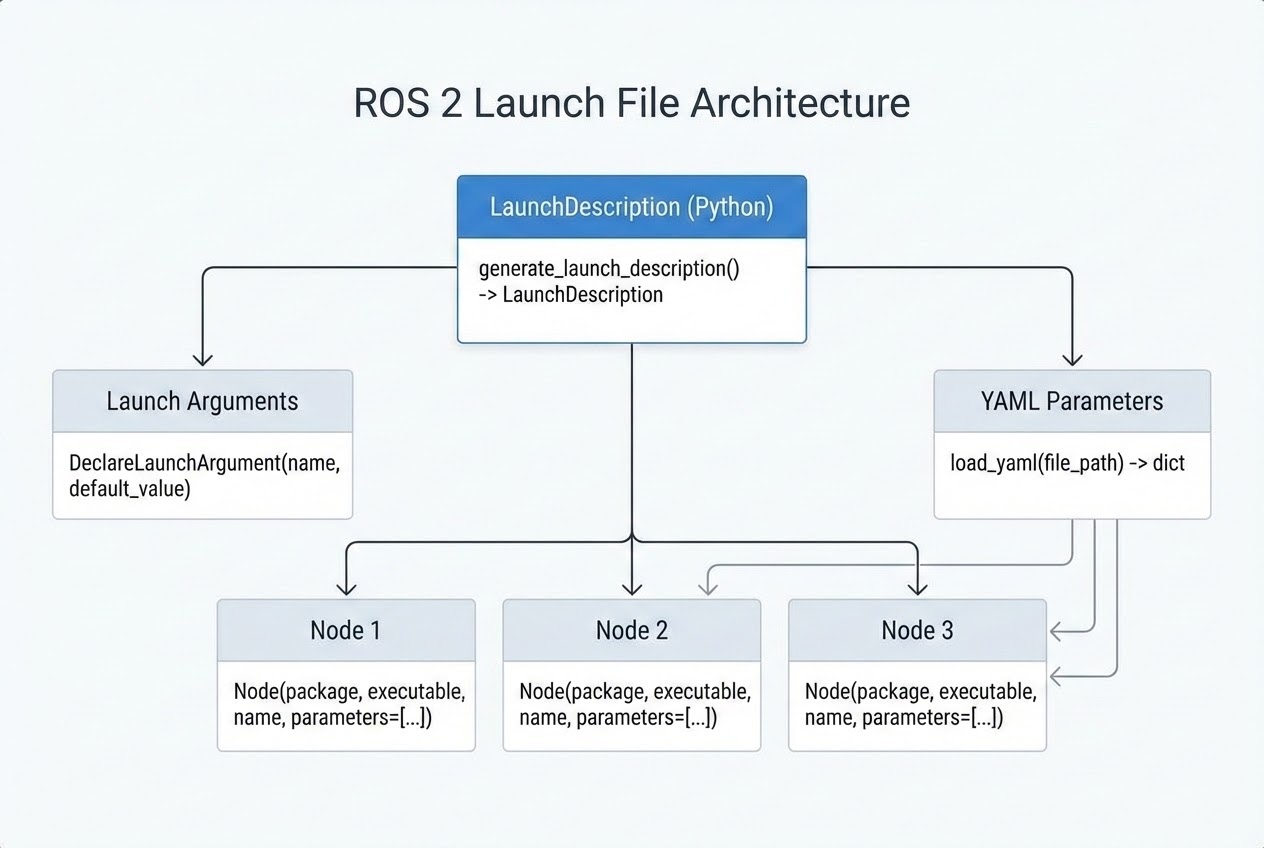
โครงสร้างหลักของ Python Launch File จะประกอบด้วย 3 ส่วนสำคัญ (The Holy Trinity):
LaunchDescription: คือกล่องเปล่าๆ ที่ทำหน้าที่เป็น “รายการสิ่งที่ต้องทำ (To-Do List)” เราจะเอาทุกอย่างมายัดใส่กล่องนี้เพื่อส่งกลับไปให้ระบบประมวลผลNode: คำสั่งในการเรียกใช้โปรแกรมย่อย เราสามารถระบุชื่อ Package, ชื่อ Executable, เปลี่ยนชื่อ Node กะทันหัน (Name) และยัดค่า Parameters เข้าไปในนี้ได้เลยDeclareLaunchArgumentและLaunchConfiguration: นี่คือการรับค่า Arguments จากผู้ใช้งานผ่าน Terminal (เช่น ให้ผู้ใช้พิมพ์สั่งว่าอยากรันในโหมด Simulator หรือหุ่นยนต์จริง) แล้วส่งค่านั้นไปเปลี่ยนพฤติกรรมของ Node
4. 💻 ร่ายมนต์โค้ดและคำสั่ง (Show me the Code)
เรามาดูหน้าตาของ Python Launch File ฉบับมาตรฐานกันครับ โค้ดนี้จะสาธิตการรับ Argument จาก Terminal และการตั้งค่า Parameters ให้กับ Node ไปพร้อมๆ กัน!
1. โค้ด Python Launch File (my_robot.launch.py):
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
def generate_launch_description():
# 1. สร้างตัวแปรรับค่าจาก Terminal (Launch Arguments)
# สมมติว่าให้ผู้ใช้เลือกว่าจะใช้ Simulation Mode หรือไม่ (ค่าเริ่มต้นคือ false)
use_sim_time_arg = DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Enable simulation mode for testing'
)
# ดึงค่าที่ผู้ใช้พิมพ์มาเก็บไว้ใน LaunchConfiguration
sim_time_config = LaunchConfiguration('use_sim_time')
# 2. นิยาม Node ที่ต้องการรัน พร้อมตั้งค่า Parameters
my_custom_node = Node(
package='my_robot_package', # ชื่อแพ็กเกจ
executable='robot_controller', # ชื่อโปรแกรมที่คอมไพล์แล้ว
name='main_controller', # จับเปลี่ยนชื่อ Node เสียใหม่ (ถ้าต้องการ)
output='screen', # ให้ปริ้นต์ Log ออกมาที่หน้าจอ Terminal ด้วย
parameters=[ # ยัด Parameters แบบ Dictionary เข้าไป
{'max_speed': 2.5},
{'use_sim_time': sim_time_config} # ใช้ค่า Argument ที่รับมาเมื่อกี้!
],
remappings=[ # เปลี่ยนชื่อ Topic (Remap) กลางอากาศได้ด้วย
('/cmd_vel', '/robot/cmd_vel')
]
)
# 3. เอาทุกอย่างยัดใส่กล่อง LaunchDescription แล้วส่งคืนให้ระบบรัน!
return LaunchDescription([
use_sim_time_arg,
my_custom_node
])2. วิธีการรันผ่าน Terminal: เมื่อเราเขียนเสร็จและคอมไพล์แล้ว (อย่าลืมคอมไพล์นะครับ!) เราจะสั่งรันผ่าน Terminal แบบนี้ครับ:
# รัน Launch File ด้วยค่า Default (use_sim_time จะเป็น false)
ros2 launch my_robot_package my_robot.launch.py
# รันโดยส่งค่า Argument แทรกเข้าไป (use_sim_time จะกลายเป็น true)
ros2 launch my_robot_package my_robot.launch.py use_sim_time:=true5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
ในฐานะที่พี่คลุกคลีกับการทำหุ่นยนต์มา นี่คือจุดที่วิศวกรมือใหม่มักจะ “ตกม้าตาย” เรื่อง Launch Files ครับ:
- หลุมพราง
setup.py(File Not Found!): ถ้าน้องเขียน Node ด้วย Python (ใช้setup.py) แล้วสั่งros2 launchระบบฟ้องว่าหาไฟล์ไม่เจอ! สาเหตุคือ น้องลืมไปอัปเดตไฟล์setup.pyครับ! น้องต้องไปเพิ่มบรรทัดนี้ในหมวดdata_filesเสมอ เพื่อบอกให้colcon buildก๊อปปี้ไฟล์ Launch ไปไว้ในโฟลเดอร์install:('share/' + package_name + '/launch', ['launch/my_robot.launch.py']), - วิชาแยกร่าง (IncludeLaunchDescription):
ถ้าหุ่นยนต์มี 30 Nodes น้องอย่าเขียนทุกอย่างไว้ในไฟล์เดียวนะครับ! โค้ดจะยาวเป็นพันบรรทัด ให้ใช้เทคนิค “ไฟล์เรียกไฟล์” โดยแยกเป็นไฟล์ย่อย (เช่น
sensors.launch.py,navigation.launch.py) แล้วใช้คำสั่งIncludeLaunchDescription(PythonLaunchDescriptionSource(...))ในไฟล์หลักเพื่อดึงไฟล์ย่อยเหล่านั้นมาทำงานร่วมกัน นี่คือ Best Practice ของการทำ Modular Design ครับ! - การโยนไฟล์ YAML เข้าไปใน Launch:
ในตัวอย่างพี่ใส่ Parameter เป็นดิกชันนารี
{'max_speed': 2.5}ซึ่งเหมาะกับพารามิเตอร์น้อยๆ แต่ถ้า Node นั้นมีพารามิเตอร์สัก 50 ตัว ให้สร้างไฟล์config.yamlขึ้นมา แล้วใช้คำสั่งos.path.join(get_package_share_directory('ชื่อแพ็ก'), 'config', 'config.yaml')เพื่อโหลดไฟล์นั้นไปโยนใส่บรรทัดparameters=[...]ของ Node ได้เลยครับ สะอาดและเป็นระเบียบกว่าเยอะ!
6. 🏁 บทสรุป (To be continued…)
Launch Files คือเครื่องมือทรงพลังที่เปลี่ยนงาน “กรรมกร” ให้กลายเป็นระบบ “อัตโนมัติ” การเข้าใจวิธีใช้ LaunchDescription, การตั้งค่า Node และการโยน LaunchArgument คือทักษะที่จะแยกความเป็นมือสมัครเล่นออกจากมืออาชีพครับ!
ตอนนี้น้องๆ มีอาวุธในการเปิดระบบขนาดใหญ่พร้อมกันแล้ว! ในตอนต่อไป พี่จะพาน้องๆ ไปลุยกับระบบสถาปัตยกรรมระดับปรมาจารย์ของ ROS นั่นคือ TF (Transform Framework) ที่ใช้ในการอ้างอิงพิกัดสามมิติระหว่างชิ้นส่วนต่างๆ ของหุ่นยนต์กันครับ เตรียมตัวยืดเส้นยืดสายรอไว้ได้เลย!
ต้องการที่ปรึกษาด้านการออกแบบสถาปัตยกรรมหุ่นยนต์ (Robotics) และระบบ Automation ให้กับองค์กรของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและพัฒนาซอฟต์แวร์แบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p