ตอนที่ 14: ประกอบร่างข้อมูลหุ่นยนต์! การสร้าง Custom Messages และ Services ของตัวเอง
1. 🎯 ตอนที่ 14: ประกอบร่างข้อมูลหุ่นยนต์! การสร้าง Custom Messages และ Services ของตัวเอง
สวัสดีครับน้องๆ วิศวกรหุ่นยนต์ทุกคน! ผ่านมาหลายตอนแล้ว เราได้รู้จักการใช้ Topic และ Service เพื่อให้มดงาน (Node) ของเราสื่อสารกันได้ แต่ที่ผ่านมาเราแอบยืม “กล่องพัสดุมาตรฐาน” (Standard Messages) อย่าง std_msgs/String หรือ geometry_msgs/Twist มาใช้ตลอดเลยใช่ไหมครับ?
แล้วถ้าวันหนึ่ง น้องๆ สร้างหุ่นยนต์ที่มีเซ็นเซอร์แปลกๆ ล่ะ? เช่น อยากส่งข้อมูล “อุณหภูมิมอเตอร์, เปอร์เซ็นต์แบตเตอรี่, และรหัส Error” ไปพร้อมๆ กันในการประกาศ Topic ครั้งเดียว… ถ้าน้องต้องแยกส่ง 3 Topics คงวุ่นวายตายเลย! วันนี้พี่จะพามาแก้ปัญหานี้ด้วยการสร้าง “Custom Interfaces (.msg และ .srv)” หรือกล่องพัสดุสั่งตัดพิเศษฉบับของเราเองกันครับ!
2. 📖 เปิดฉาก (The Hook)
สมมติว่าน้องกำลังทำโปรเจกต์หุ่นยนต์โกดังสินค้า แล้วอยากสร้าง Service สั่งให้หุ่นยนต์ “เปิดไฟสัญญาณเตือนพร้อมเสียง” น้องลองไปค้นหาใน std_srvs หรือ example_interfaces ก็พบว่า… มันไม่มี Service ตัวไหนเลยที่รับค่า Boolean (เปิด/ปิด) และรับค่า Integer (รหัสเสียง) ได้ในกล่องเดียวกัน!
ปัญหาคลาสสิกของคนทำหุ่นยนต์คือ การพยายามเอาข้อมูลที่ซับซ้อนไปยัดลงใน Message พื้นฐานที่ไม่ตอบโจทย์ (เช่น แอบเอาข้อมูลใส่ลงใน String แล้วค่อยไปเขียนโค้ดแยก String ทีหลัง) ซึ่งเป็นวิธีการที่ “ผิดมหันต์และไม่เสถียร” ครับ!
ในโลกของ ROS 2 ถ้าเราหา Interface ที่ตรงสเปกเป๊ะๆ ไม่เจอ กฎเหล็กคือ “จงสร้างมันขึ้นมาใหม่ (Custom Interfaces)!” แล้วจับมันแพ็กใส่ Package แยกไว้ เพื่อให้ Node ทุกตัวในระบบเรียกใช้งานได้อย่างเป็นระเบียบครับ
3. 🧠 แก่นวิชา (Core Concepts)
ก่อนที่เราจะไปเขียนโค้ด เราต้องเข้าใจหลักการสำคัญ 3 ข้อของการสร้าง Custom Interfaces ใน ROS 2 ก่อนครับ:
- กฎข้อที่ 1: แยก Interface Package ออกมาต่างหาก (Best Practice):
เราจะไม่สร้างไฟล์
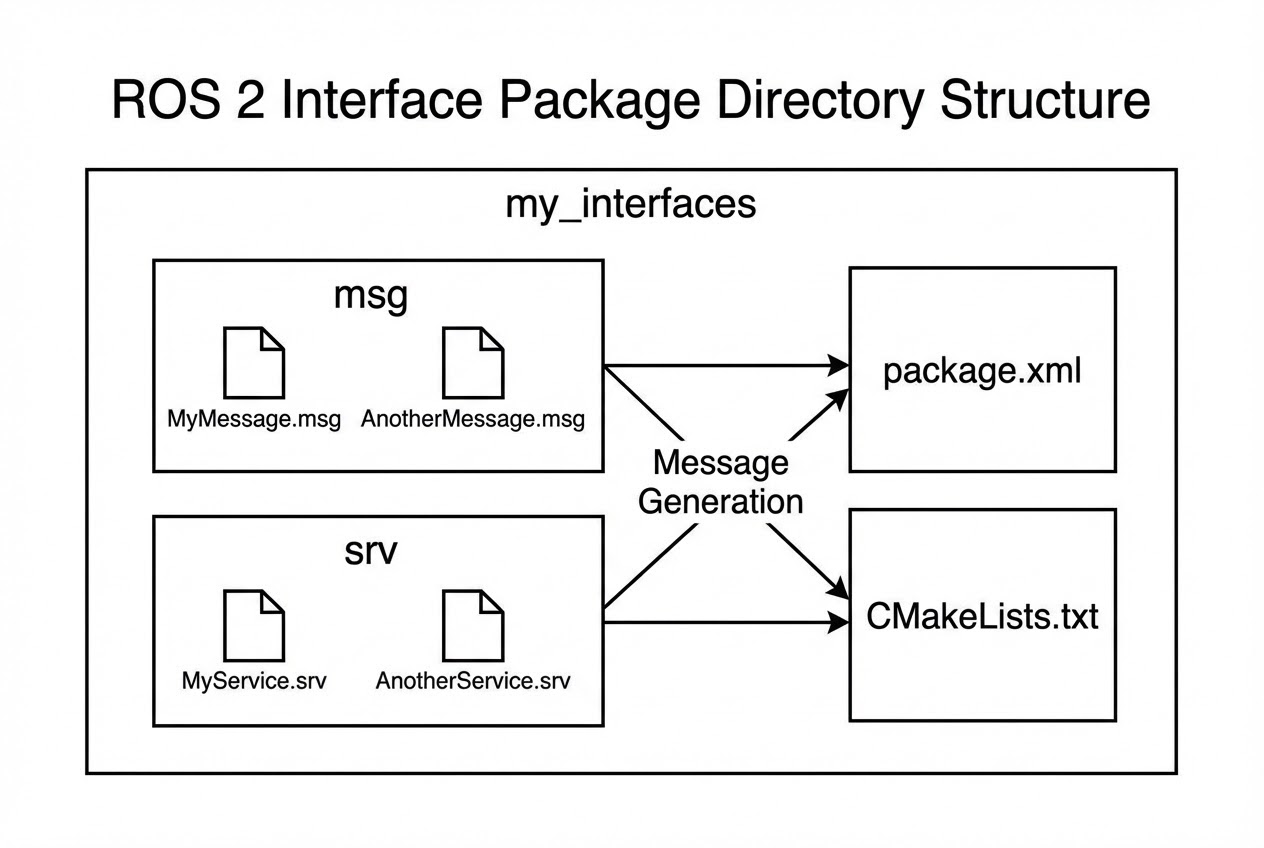
.msgหรือ.srvปะปนไว้ใน Package ที่มีซอร์สโค้ด Node (C++/Python) ครับ แต่เราจะสร้าง Package ใหม่ขึ้นมา (เช่นmy_robot_interfaces) เพื่อเก็บไฟล์ Interface เหล่านี้โดยเฉพาะ! วิธีนี้จะช่วยป้องกันปัญหา Dependency พันกันยุ่งเหยิง (Dependency Mess) ในอนาคต - ไฟล์
.msg(สำหรับ Topic): เป็นเพียงไฟล์ Text ธรรมดาที่ประกาศชนิดของตัวแปรและชื่อตัวแปรเรียงกันลงมา (เช่นfloat64 temperature) เมื่อคอมไพล์เสร็จ ROS 2 จะแปลงไฟล์นี้เป็น Class ให้เราเรียกใช้ใน C++ หรือ Python อัตโนมัติ - ไฟล์
.srv(สำหรับ Service): โครงสร้างจะคล้ายกับ.msgแต่ความพิเศษคือมันจะถูกแบ่งออกเป็น 2 ส่วนด้วยเครื่องหมายขีดกลางสามเส้น---โดยด้านบนคือฝั่ง Request (คำขอ) และด้านล่างคือฝั่ง Response (คำตอบ) ครับ
4. 💻 ร่ายมนต์โค้ดและคำสั่ง (Show me the Code)
มาลงมือทำกันเลยครับ! เราจะสร้าง Package ชื่อ my_robot_interfaces ขึ้นมาเพื่อเก็บ Custom Message และ Service ของเรา
1. สร้าง Package สำหรับ Interfaces โดยเฉพาะ เปิด Terminal ขึ้นมาแล้วรันคำสั่งต่อไปนี้:
cd ~/ros2_ws/src/
# สร้าง Package เปล่าๆ แบบ ament_cmake (Interface ต้องเป็น ament_cmake เสมอ!)
ros2 pkg create my_robot_interfaces
# เข้าไปลบโฟลเดอร์ที่ไม่จำเป็นทิ้ง แล้วสร้างโฟลเดอร์ msg และ srv ขึ้นมาแทน
cd my_robot_interfaces
rm -r src/ include/
mkdir msg srv2. สร้าง Custom Message (.msg)
สมมติว่าเราอยากส่งสถานะฮาร์ดแวร์หุ่นยนต์ ให้สร้างไฟล์ชื่อ HardwareStatus.msg ในโฟลเดอร์ msg/:
(ข้อควรระวัง: ชื่อไฟล์ต้องเป็น PascalCase เช่น HardwareStatus เสมอ)
# ไฟล์: my_robot_interfaces/msg/HardwareStatus.msg
int64 version
float64 temperature
bool are_motors_ready
string debug_message3. สร้าง Custom Service (.srv)
สมมติว่าเราอยากได้ Service สำหรับสั่งรีเซ็ตค่าต่างๆ ให้สร้างไฟล์ชื่อ ResetCounter.srv ในโฟลเดอร์ srv/:
# ไฟล์: my_robot_interfaces/srv/ResetCounter.srv
int64 reset_value
---
bool success
string message4. ปลดล็อกพลังด้วย package.xml
เปิดไฟล์ package.xml ของ my_robot_interfaces แล้วเพิ่มแท็กศักดิ์สิทธิ์ 3 บรรทัดนี้ต่อจาก <buildtool_depend>ament_cmake</buildtool_depend>:
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>5. สอนระบบให้คอมไพล์ใน CMakeLists.txt
เปิดไฟล์ CMakeLists.txt แล้วเพิ่มโค้ดด้านล่างนี้ คั่นระหว่าง find_package(ament_cmake REQUIRED) กับ ament_package():
# ตามหาเครื่องมือสร้าง Interface
find_package(rosidl_default_generators REQUIRED)
# ระบุรายชื่อไฟล์ .msg และ .srv ของเรา
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/HardwareStatus.msg"
"srv/ResetCounter.srv"
)
# ส่งออก Dependency ให้ Package อื่นใช้ได้
ament_export_dependencies(rosidl_default_runtime)6. ประกอบร่าง! (Build & Source) กลับมาที่ Workspace หลัก แล้วสั่งบิลด์เฉพาะ Package นี้:
cd ~/ros2_ws/
colcon build --packages-select my_robot_interfaces
source install/setup.bash
# ตรวจสอบความสำเร็จ! ถ้าขึ้นรายละเอียดตัวแปรแสดงว่าคอมไพล์ผ่านแล้ว
ros2 interface show my_robot_interfaces/msg/HardwareStatus5. 🛡️ เคล็ดลับจากคัมภีร์ลับ (Under the Hood / Pro-Tips)
- วิชาตกม้าตาย: ลืมเครื่องหมาย
---ในไฟล์.srv: พี่เจอน้องๆ บ่นว่าบิลด์.srvไม่ผ่านบ่อยมาก! สาเหตุหลักคือลืมใส่---ครับ กฎเหล็กคือ ต่อให้ Request หรือ Response ของน้องจะว่างเปล่า (ไม่มีตัวแปรเลยสักตัว) น้องก็ต้องใส่เครื่องหมาย---คั่นไว้เสมอ ครับ! ไม่งั้นคอมไพเลอร์ของ ROS 2 จะงงว่านี่มันคือ.msgหรือ.srvกันแน่ - อย่าใช้
std_msgsซ้อนเข้าไปใน Interface ถ้าไม่จำเป็น: เวลาประกาศตัวแปรในไฟล์.msgให้ใช้ Primitive types (เช่นint64,float32,string) ตรงๆ ไปเลยครับ หลีกเลี่ยงการใช้std_msgs/Int64มาซ้อนเป็นฟิลด์ย่อย เพราะมันจะทำให้โครงสร้างข้อมูลบวมโดยใช่เหตุ และต้องมานั่งอ้างอิงฟิลด์.dataซ้อนไปซ้อนมาเวลาเขียนโค้ดครับ - การนำไปใช้ใน Package อื่น:
หลังจากบิลด์เสร็จ ถ้าน้องจะเขียน Node (C++ หรือ Python) ใน Package อื่นเพื่อเรียกใช้กล่องพัสดุนี้ น้องต้องไปเพิ่ม
<depend>my_robot_interfaces</depend>ในpackage.xmlของ Package ปลายทางด้วยนะครับ! จากนั้นใน Python ก็แค่ร่ายมนต์from my_robot_interfaces.msg import HardwareStatusก็ใช้งานได้เลย!
6. 🏁 บทสรุป (To be continued…)
เห็นไหมครับว่าการสร้าง Custom Message และ Service ใน ROS 2 นั้นไม่ได้น่ากลัวอย่างที่คิด ขอแค่เรารู้จักการจัดการ “Interface Package” ให้เป็นระเบียบ และการตั้งค่าไฟล์ CMakeLists.txt กับ package.xml ให้ถูกต้อง เราก็สามารถออกแบบโครงสร้างข้อมูลให้เข้ากับหุ่นยนต์ของเราได้ 100% แล้วครับ!
ในตอนต่อไป พี่จะพาน้องๆ มารู้จักกับกระดูกสันหลังของหุ่นยนต์ นั่นก็คือ TF (Transform Framework) เราจะมาดูกันว่า หุ่นยนต์มันรู้ได้อย่างไรว่า “กล้อง” ติดอยู่ห่างจาก “ล้อ” กี่เซนติเมตร และมันช่วยในการคำนวณระยะทางได้อย่างไร เตรียมตัวรับมือกับคณิตศาสตร์และเวกเตอร์กันให้พร้อมนะครับ!
ต้องการที่ปรึกษาด้านการออกแบบสถาปัตยกรรมหุ่นยนต์ (Robotics) และระบบ Automation ให้กับองค์กรของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและพัฒนาซอฟต์แวร์แบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p