ตอนที่ 13: CIP Motion และ CIP Sync: การควบคุมแกนเคลื่อนที่ระดับไมโครวินาที
1. 🎯 ตอนที่ 13: CIP Motion และ CIP Sync: การควบคุมแกนเคลื่อนที่ระดับไมโครวินาที
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับน้องๆ สาย Automation และผู้อ่านทุกท่าน! ชงกาแฟเข้มๆ แล้วมากางแผนผัง Network Topology คุยกันต่อในซีรีส์ เจาะลึก Industrial Network & SCADA จาก 101 สู่ Advanced ครับ
เมื่อพูดถึงงานควบคุมการเคลื่อนที่ (Motion Control) เช่น การคุมแขนกลหุ่นยนต์ให้เชื่อมชิ้นส่วนรถยนต์ หรือระบบตัดเหล็กแบบอิเล็กทรอนิกส์ (Electronic Gearing/Camming) สิ่งที่วิศวกรกลัวที่สุดคือคำว่า “Jitter” หรือความไม่แน่นอนของเวลาในเครือข่ายครับ ในอดีต หากเราต้องการควบคุม Servo Motor หลายๆ แกนให้ขยับพร้อมกันเป๊ะๆ เรามักจะต้องใช้สายสัญญาณเฉพาะทาง หรือเครือข่ายแยกต่างหากที่ออกแบบมาเพื่อ Motion โดยเฉพาะ (Purpose-built motion-optimized network) ซึ่งทำให้ระบบมีราคาแพงและซับซ้อนยุ่งยาก
แต่ถ้าพี่บอกว่า ในโลกของ CIP เราสามารถคุม Servo หลายร้อยแกนให้ทำงานประสานกันได้เนียนกริบ บนสาย LAN (EtherNet/IP) เส้นเดียวกับที่เราใช้ต่อจอ HMI และเปิดเว็บเบราว์เซอร์ล่ะครับ? เวทมนตร์ที่ทำให้เรื่องนี้เป็นไปได้คือการผสานพลังของ CIP Sync และ CIP Motion ครับ! วันนี้เราจะมาเจาะลึกกันว่า CIP ขยายขีดความสามารถอย่างไรให้คุมเวลาได้แม่นยำระดับ “นาโนวินาที”!
3. 🧠 แก่นวิชาโครงข่าย (Core Concepts)
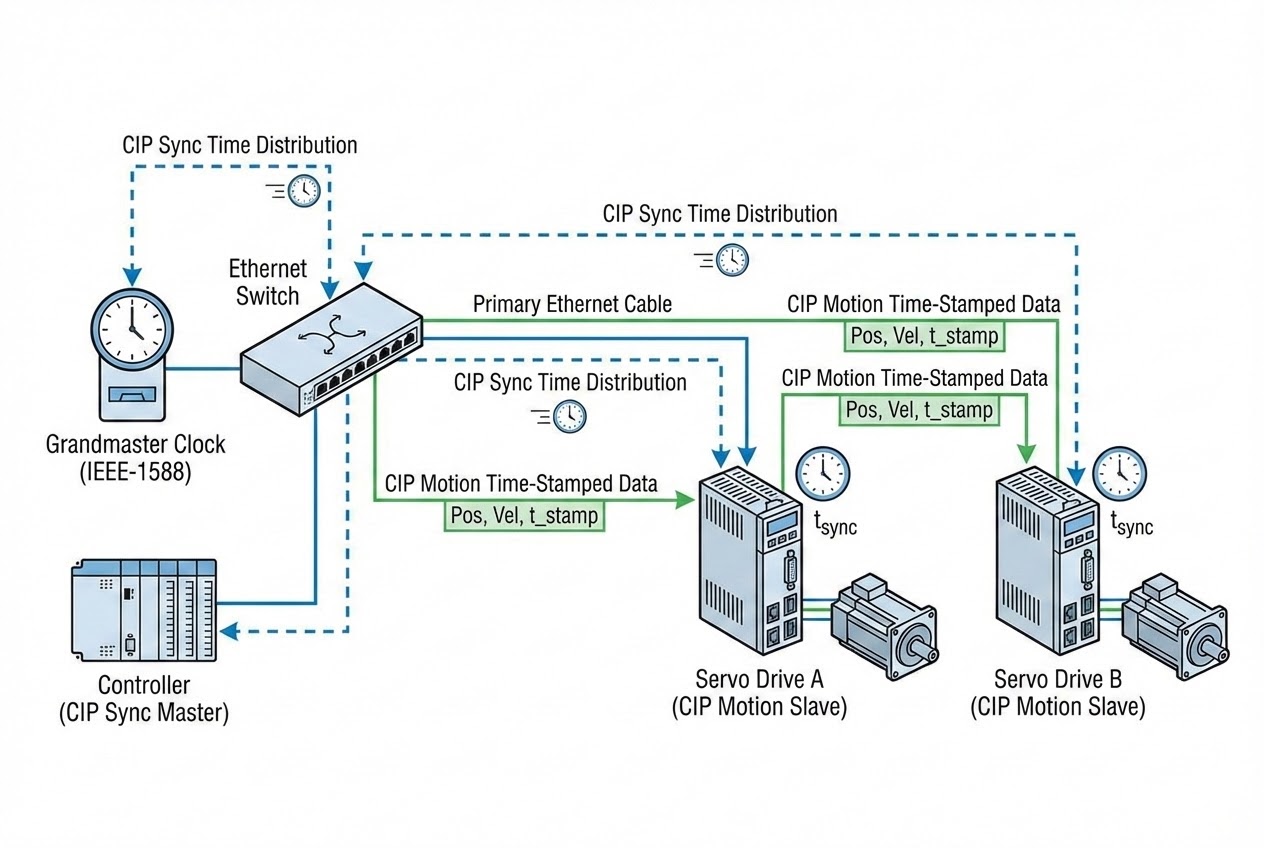
ปัญหาของเครือข่าย Ethernet มาตรฐานคือการแย่งกันส่งข้อมูล (CSMA/CD) ทำให้เรารับประกันไม่ได้ว่าแพ็กเก็ตคำสั่งจะไปถึง Drive ตอนไหน แนวทางแก้ปัญหาของ CIP จึงไม่ใช่การ “บังคับเครือข่ายให้ส่งตรงเวลา” แต่คือการ “ทำให้ทุกคนนาฬิกาตรงกัน” แทนครับ ซึ่งเราเรียกว่า CIP Sync
- CIP Sync และสหาย IEEE-1588: CIP Sync เป็นเทคโนโลยีที่สร้างขึ้นบนมาตรฐานระดับโลกอย่าง IEEE 1588 (Precision Time Protocol หรือ PTP) โครงสร้างของมันทำงานแบบมี “Time Master” (นาฬิกาแม่ข่าย) ทำหน้าที่กระจายเวลาไปให้ “Time Slaves” (นาฬิกาลูกข่าย) ในระบบ เพื่อให้ได้ความแม่นยำสูงสุด ระบบจะมีการชดเชยเวลาที่เสียไประหว่างการส่งข้อมูลในสายสัญญาณ (Transmission delay และ Jitter) โดยการจับเวลาที่ฮาร์ดแวร์ระดับล่างสุด (Hardware-assisted time capture) ผลลัพธ์คือ อุปกรณ์ทุกตัวบนเครือข่ายจะมีนาฬิกา (System Time) ที่ตรงกันเป๊ะโดยมีความคลาดเคลื่อนต่ำกว่า 100 ถึง 250 นาโนวินาที! เพื่อจัดการเรื่องนี้ CIP ได้เพิ่ม Time Sync Object (Class ID: 0x43) เข้ามาในอุปกรณ์เพื่อใช้คุยกับระบบเวลาโดยเฉพาะ
4. 💻 ร่ายมนต์สถาปัตยกรรม (Architecture & Implementation)
เมื่ออุปกรณ์ทุกตัว “นาฬิกาตรงกันแล้ว” ก็ถึงเวลาของ CIP Motion ครับ! CIP Motion ถูกเพิ่มเข้ามาในเอกสารมาตรฐาน CIP Networks Library เมื่อปี 2006 โดยประกอบด้วย Motion Axis Object และ Motion Device Profile
แทนที่จะใช้กลไกการจองเวลาเครือข่ายที่แข็งทื่อ (Network scheduling) สถาปัตยกรรม CIP Motion เลือกใช้กลไกที่เรียกว่า Time Synchronized Distributed Control พี่ขอเปรียบเทียบง่ายๆ แบบนี้ครับ:
- ระบบ Motion แบบเก่า: คอนโทรลเลอร์สั่ง Drive ว่า “เดินหน้า!” (แล้ว Drive ก็ทำทันทีที่ได้รับคำสั่ง ถ้าคำสั่งมาช้า มอเตอร์ก็หมุนช้าตาม)
- ระบบ CIP Motion: คอนโทรลเลอร์จะสั่งแนบ “เวลา” ไปกับข้อมูล (Time Stamp) โดยสั่งว่า “ให้มอเตอร์หมุนไปที่ตำแหน่ง X, และต้องไปถึงที่นั่นในเวลา Y นะ!”
ด้วยวิธีนี้ ต่อให้แพ็กเก็ตข้อมูลจะเจอปัญหารถติดบนเครือข่าย (Jitter) ทำให้เดินทางไปถึง Drive ช้าหรือเร็วไปนิดหน่อย ก็ไม่มีปัญหาเลยครับ เพราะตัว Drive จะรับข้อมูลมาเก็บไว้ก่อน แล้วรอ “ลงมือทำ (Execute)” ตาม Command Target Time ที่ระบุไว้ในแพ็กเก็ตอย่างแม่นยำ
นอกจากนี้ เนื่องจากเวลารอบการทำงานของ Drive (Device Update Period) มักจะไวกว่ารอบการส่งข้อมูลของ Controller เสมอ ตัว Motion Axis Object จึงมีกลไกอัจฉริยะที่เรียกว่า Fine Interpolation (การทำอินเตอร์โพเลชันแบบละเอียด) โดยใช้สมการโพลิโนเมียล (Polynomial) ลำดับที่ 1 ถึง 3 เพื่อสร้างเส้นโค้งการเคลื่อนที่ (Trajectory) ให้มอเตอร์หมุนได้เนียนกริบระหว่างรอคำสั่งรอบถัดไปครับ
5. 🛡️ เคล็ดลับจากห้องคอนโทรล (Under the Hood / Pro-Tips)
สำหรับ Network Architect ที่ต้องไปออกแบบระบบ Motion บน EtherNet/IP พี่มีไม้ตายก้นหีบมาฝากครับ:
- กลไก Ride-through ด้วย Extrapolation: ถ้าสมมติว่าเกิด Network Latency หรือสวิตช์มีปัญหาจนแพ็กเก็ตคำสั่ง (Controller-to-Device) หายไป 1 รอบ CIP Motion จะไม่สั่งหยุดเครื่องจักรทันทีให้ของเสียครับ แต่มันจะใช้สมการ Extrapolation (การประมาณค่าล่วงหน้า) เพื่อคำนวณทิศทางความเร็วเดิมของแกน แล้วสั่งให้มอเตอร์เดินต่อไปอย่างสมูท (Smooth) จนกว่าข้อมูลชุดใหม่จะเดินทางมาถึง!
- จัดการ QOS (Quality of Service) ให้ดี: เนื่องจาก CIP Sync และ CIP Motion อาศัยอยู่บนโครงสร้าง Ethernet มาตรฐาน (UDP/IP และ TCP/IP) เราจึงสามารถเอาทราฟฟิกเว็บ (HTTP) หรือ HMI มาวิ่งปะปนบนสายเดียวกันได้เลย (Coexistence) แต่! มีข้อแม้ว่าคุณต้องตั้งค่าสวิตช์ให้ใช้ฟีเจอร์ IEEE 802.1Q (Tagged Frames) เพื่อติดป้าย “VIP (Priority)” ให้กับข้อมูล CIP Sync และ Motion เสมอ เพื่อให้สวิตช์ลัดคิวส่งข้อความควบคุมการเคลื่อนที่ก่อนข้อมูลประเภทอื่น
- การสลับสับเปลี่ยนไร้รอยต่อ (Interchangeability): CIP Motion Profile ถูกออกแบบมาเพื่อรวมการควบคุม Servo Drives แบบ Closed-loop และ Inverter VFD แบบ Open-loop เข้าด้วยกัน ทำให้พารามิเตอร์พื้นฐาน, การตั้งค่า, และโครงสร้างสถานะ (Diagnostics) มีความเป็นมาตรฐานเดียวกัน (Common application instruction) คุณจึงสามารถใช้โค้ด PLC เดียวกันคุมได้ทั้ง Servo และ VFD ได้อย่างง่ายดาย!
6. 🏁 บทสรุป (To be continued…)
จะเห็นได้ว่า CIP Motion และ CIP Sync เป็นเหมือนคู่หูสุดเทพที่เข้ามาปฏิวัติวงการ มันช่วยให้เราก้าวข้ามข้อจำกัดของเครือข่าย Ethernet แบบเดิมๆ โดยการใช้ “เวลา (System Time)” เป็นตัวประสานงาน (Synchronicity) ระดับไมโครวินาที ทำให้โรงงานสามารถใช้สาย LAN เส้นเดียวคุมได้ตั้งแต่งานข้อมูล I/O ธรรมดา ทะลุไปจนถึงงานควบคุมการเคลื่อนที่ระดับ 100 แกน โดยไม่ต้องพึ่งพาสายสัญญาณหรือเครือข่ายพิเศษอีกต่อไป
ในตอนต่อไป เราจะมาคุยกันในส่วนของการทำงานร่วมกับเทคโนโลยีข้ามค่ายกันบ้าง เมื่อเราต้องเอา CIP ไปเชื่อมต่อกับโปรโตคอลระดับตำนานอย่าง Modbus มันจะมีกลไกหรือวุ้นแปลภาษาตัวไหนมารับหน้าที่นี้? รอติดตามอ่านในซีรีส์ เจาะลึก Industrial Network & SCADA นะครับ!
ต้องการที่ปรึกษาด้านการออกแบบสถาปัตยกรรมโครงข่ายอุตสาหกรรม (Industrial Networks) หรือระบบ SCADA สำหรับโรงงานของคุณ? ทีมงาน WP Solution พร้อมให้บริการออกแบบและติดตั้งระบบแบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p