ตอนที่ 25: Gimbal Lock: ฝันร้ายแห่งการหมุน! อาถรรพ์แกนทับซ้อนที่ทำลายโลก 3 มิติ
1. 🎯 ตอนที่ 25: Gimbal Lock: ฝันร้ายของการหมุน 3 มิติ
2. 📖 เปิดฉาก (The Hook)
สวัสดีครับนักสร้างโลกจินตนาการทุกคน! ยินดีต้อนรับกลับเข้าสู่ซีรีส์ ปูพื้นฐานคณิตศาสตร์สู่โลกคอมพิวเตอร์กราฟิก ครับ
จำตอนที่เราเรียนเรื่อง Euler Angles (การหมุนรอบแกน X, Y, Z แบบ Pitch, Yaw, Roll) กันได้ไหมครับ? มันเป็นระบบที่เข้าใจง่ายและเป็นธรรมชาติสำหรับมนุษย์สุดๆ แต่รู้หรือไม่ครับว่า ภายใต้ความใช้งานง่ายนั้น มันซ่อน “ปีศาจ” ร้ายแรงเอาไว้ตัวหนึ่ง!
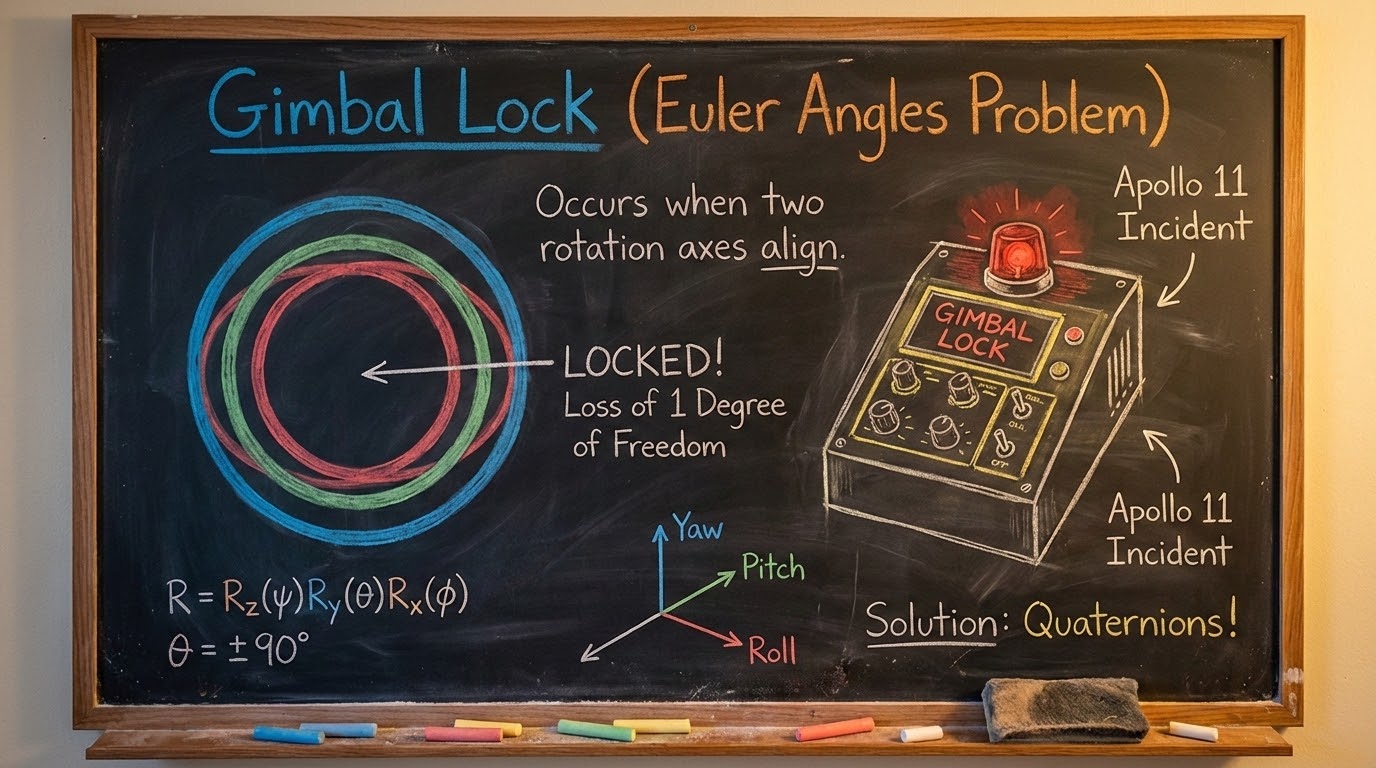
ในยุคบุกเบิกอวกาศ ยาน Apollo 10 และ 13 ของ NASA มีไฟเตือนสีแดงดวงใหญ่บนแผงควบคุมที่เขียนว่า “GIMBAL LOCK” หากไฟดวงนี้สว่างขึ้น แปลว่าระบบนำทางอาจจะพังพินาศและนักบินอวกาศอาจไม่ได้กลับบ้าน!
ในโลกของการทำเกมก็เช่นกันครับ มีตำนานสยองขวัญ (Urban Legend) ของโปรแกรมเมอร์ที่ทำระบบจำลองเครื่องบินขับไล่ F-16 เมื่อเครื่องบินบินข้ามเส้นศูนย์สูตรหรือบินเชิดหน้าขึ้น 90 องศา จู่ๆ เครื่องบินทั้งลำก็ “พลิกหงายท้อง (Flip)” ตีลังกากลับหัวแบบผิดกฎฟิสิกส์ไปเสียดื้อๆ! ความบ้าคลั่งทั้งหมดนี้เกิดจากข้อจำกัดทางคณิตศาสตร์ที่เรียกว่า Gimbal Lock ครับ วันนี้พี่จะพาดำดิ่งไปดูว่า ฝันร้ายของการหมุน 3 มิตินี้เกิดจากอะไร และทำไมเกมยุคเก่าถึงชอบมีอาการมุมกล้องสั่นกระตุก!
3. 🧮 จากตัวเลขสู่กราฟิก (Math to Graphics Foundation)
Gimbal Lock (ภาวะล็อกของวงแหวนหมุน) คือปรากฏการณ์ที่ระบบสูญเสีย “มิติแห่งการเคลื่อนที่ (Degree of Freedom)” ไปหนึ่งมิติครับ
มาทบทวนคณิตศาสตร์กันก่อน ในระบบ Euler Angles เราใช้สมการคูณ Matrix เพื่อหมุนโมเดลตามลำดับแกน (เช่น แบบ Heading-Pitch-Bank หรือ Yaw-Pitch-Roll): $$ M = R_y(h) \times R_x(p) \times R_z(b) $$
นักคณิตศาสตร์พบว่า รอยรั่วของสมการ (Singularity) จะเกิดขึ้นเมื่อเราหมุนแกนกลาง (ในที่นี้คือแกน X หรือ Pitch) ไปที่มุม $\pm 90^\circ$ (เงยหน้าสุด หรือ ก้มหน้าสุด) เมื่อ $p = 90^\circ$ ค่า $\cos(90^\circ)$ จะกลายเป็น $0$ ซึ่งส่งผลให้ตาราง Matrix อันซับซ้อนของเราถูกทำลาย! แกน Z เดิม (Bank) จะถูกหมุนไปทับซ้อนกับแกน Y อ้างอิง (Heading) อย่างสมบูรณ์แบบ
ผลทางคณิตศาสตร์ที่ตามมาคือ ไม่ว่าคุณจะพยายามหมุน Heading ($h$) หรือ Bank ($b$) โมเดลของคุณก็จะหมุนวนอยู่บน “แกนแนวตั้งแกนเดียวกัน”! คุณไม่สามารถสั่งให้โมเดลหมุนเอียงข้างได้อีกต่อไป นี่แหละครับคือการสูญเสีย Degree of Freedom (มิติหายไป 1 แกน กลายเป็น $1+1 \neq 2$)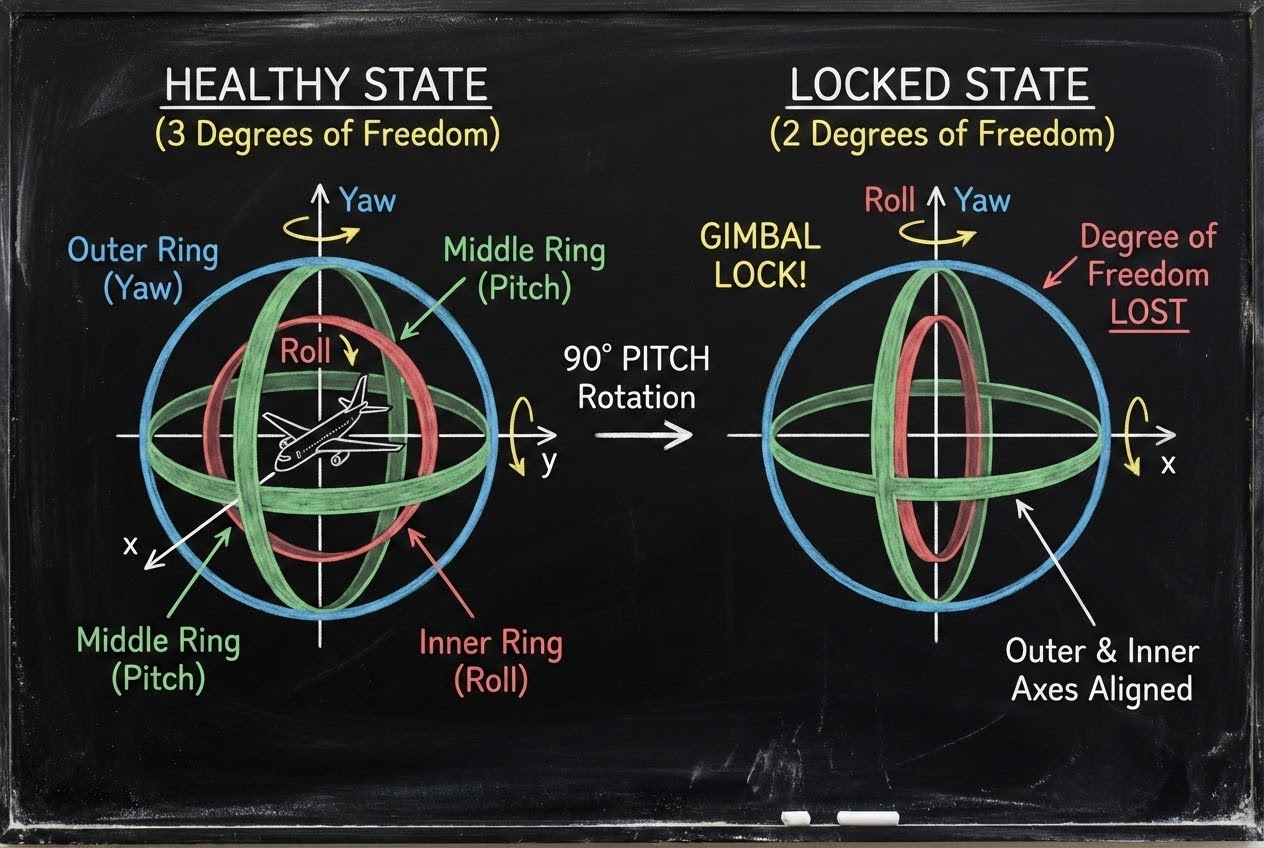
4. 📐 เจาะลึกเรขาคณิตและการประมวลผลภาพ (Geometry & Image Processing)
ถ้า Matrix เข้าใจยาก ลองนึกภาพกลไกทางกายภาพอย่าง วงแหวน Gimbal ดูครับ (อุปกรณ์แบบเดียวกับลูกข่างไจโรสโคป) มันคือวงแหวน 3 วงซ้อนทับกัน:
- วงนอกสุด (Outer): หมุนรอบแกน Y (หันซ้าย/ขวา)
- วงกลาง (Middle): หมุนรอบแกน X (ก้ม/เงย)
- วงในสุด (Inner): หมุนรอบแกน Z (เอียงซ้าย/ขวา)
สมมติว่าคุณจับวงกลาง (Pitch) พลิกขึ้น 90 องศา สิ่งที่เกิดขึ้นคือ “แกนพับของวงในสุด” จะถูกยกขึ้นมาอยู่ในแนวตั้ง ซึ่งมันบังเอิญไปขนานเป็นเส้นเดียวกับ “แกนพับของวงนอกสุด” พอดีเป๊ะ!
ในจังหวะนี้ ถ้าคุณอยากจะเอียงโมเดล (หมุนรอบแกน Z เดิม) คุณจะทำไม่ได้แล้วครับ! เพราะวงแหวนที่ทำหน้าที่นั้นมันไปพันอยู่กับแกน Y เสียแล้ว ถ้ามีแรงภายนอกมากระทำในแกนที่หายไป ระบบเซนเซอร์จะรวน (Freak out) พยายามชดเชยค่าด้วยการหมุนแกนที่เหลือกลับหลังหัน 180 องศาอย่างรุนแรง นี่คือต้นเหตุที่ทำให้ระบบนำทางยาน Apollo เสี่ยงต่อการพังทลายหากเกิด Gimbal Lock ครับ!
5. 🎮 เวทมนตร์นี้ในโลกความจริง (Real-World Game Applications)
สำหรับวงการเกม Gimbal Lock คือฝันร้ายของการทำ “แอนิเมชัน (Animation)” และ “มุมกล้อง (Camera)”:
- มุมกล้อง FPS ที่มองฟ้าไม่ได้สุด: เคยเล่นเกมยิงมุมมองบุคคลที่หนึ่งสมัยก่อนไหมครับ? เวลาเราลากเมาส์แหงนหน้ามองฟ้า ตัวเกมจะล็อกมุมกล้องไว้ที่ $89.9^\circ$ ไม่ยอมให้เราเงยหน้าถึง $90^\circ$ เป๊ะๆ! โปรแกรมเมอร์จงใจเขียนโค้ด
if (pitch >= 89.9) pitch = 89.9;ดักไว้เพื่อหนีปัญหา Gimbal Lock ครับ เพราะถ้าให้เงยถึง 90 กล้องจะเริ่มสั่นและหมุนควงสว่าน (Yaw ทับซ้อนกับ Roll) - การแทรกค่าที่บิดเบี้ยว (Naïve Interpolation): ถ้านักทำแอนิเมชันสั่งให้ตัวละครหมุนจากท่าที่ 1 ไปท่าที่ 2 โดยใช้การ Interpolation (Lerp) มุม Euler แบบตรงๆ คอมพิวเตอร์จะคำนวณทางที่สั้นที่สุดทางตัวเลข แต่มันอาจเป็นทางที่บ้าบอที่สุดในโลกฟิสิกส์! ตัวละครอาจจะแขนหักบิดเบี้ยว หมุนควงตีลังกาเป็นรูปตัว U หรือสั่นกระตุกก่อนจะกลับมายืนท่าปกติได้
6. 🏭 เปิดโรงงานผลิตภาพ (The Graphics Pipeline)
ภายใน Graphics Pipeline หรือ Game Engine การเก็บค่าการหมุนเป็นตัวเลข 3 ตัว (X, Y, Z) แม้จะประหยัดเมมโมรี่มากๆ แต่มันไม่เหมาะเลยสำหรับการบวกลบคูณหารเพื่อหา “จังหวะเคลื่อนไหวระหว่างเฟรม (In-betweening)”
เมื่อเกิด Gimbal Lock (หรือแม้แต่เข้าใกล้ภาวะนี้) การเปลี่ยนแปลงพิกัดมุมเพียงเล็กน้อย (Small parameter change) จะส่งผลให้โมเดล 3D หมุนสะบัดอย่างรุนแรงบนหน้าจอคอมพิวเตอร์! การ์ดจอ (GPU) ทำหน้าที่แค่วาดภาพตาม Matrix ที่ส่งมา ดังนั้นภาระหนักจึงตกอยู่กับ CPU ของ Game Engine ที่ต้องพยายามเอาไม้ค้ำยันมาแก้ปัญหา เช่น การเขียนโค้ดเช็คจังหวะล็อก แล้วสลับลำดับการหมุนชั่วคราว แต่นั่นก็เป็นแค่การแก้ปัญหาที่ปลายเหตุครับ
7. 🏁 บทสรุป (Level Cleared!)
เคลียร์ผ่านไปอีกด่านกับศัตรูตัวฉกาจครับ! สรุปสั้นๆ คือ Euler Angles ใช้งานง่ายสำหรับมนุษย์ แต่มีช่องโหว่ร้ายแรง (Singularity) เมื่อแกนหมุน 2 แกนมาทับซ้อนกัน ทำให้เสียมิติการควบคุมไป 1 มิติ (Gimbal Lock) ซึ่งส่งผลให้การสร้างแอนิเมชันหรือคุมทิศทางในเกมพังทลาย
คำถามคือ… แล้วระดับโลกอย่าง NASA หรือนักพัฒนา Game Engine ระดับ AAA เขาแก้ปัญหานี้กันอย่างเด็ดขาดได้อย่างไร? คำตอบคือ พวกเขาต้องทิ้งคณิตศาสตร์ 3 มิติ แล้วหนีไปพึ่งพาระบบจำนวนเชิงซ้อนในมิติที่ 4 ครับ! เตรียมไม้กายสิทธิ์ระดับตำนานของคุณไว้ให้ดี เพราะในตอนหน้า เราจะเปิดคัมภีร์เวทมนตร์บทที่แข็งแกร่งที่สุดในโลกกราฟิก สิ่งที่ถูกค้นพบโดย Sir William Rowan Hamilton… ยินดีต้อนรับเข้าสู่โลกของ “Quaternion (ควอเทอร์เนียน)” ครับ! Level Cleared!
สนใจพูดคุยแลกเปลี่ยนเทคนิคการพัฒนาเกม คอมพิวเตอร์กราฟิก หรือออกแบบระบบซอฟต์แวร์? ทีมงาน WP Solution พร้อมให้บริการออกแบบและพัฒนาซอฟต์แวร์แบบครบวงจร ดูรายละเอียดบริการของเราได้ที่: www.wpsolution2017.com หรือพูดคุยปรึกษาเบื้องต้นได้ที่ Line: wisit.p